filtfilt
ゼロ位相デジタル フィルター処理
構文
説明
y = filtfilt(b,a,x)x を順方向と逆方向の両方で処理することにより、ゼロ位相デジタル フィルター処理を実行します。データを順方向でフィルター処理した後、関数は初期条件を一致させて起動時と終了時の過渡現象を最小限に抑え、フィルター処理したシーケンスを反転し、その反転したシーケンスを逆方向にフィルター処理します。結果には、以下の特性があります。
ゼロ位相の歪み
元のフィルター伝達関数の振幅の 2 乗と等しい、フィルター伝達関数
bとaにより指定されるフィルターの次数の倍のフィルター次数
微分器フィルターやヒルベルト FIR フィルターの演算は位相応答に大きく依存しているため、関数 filtfilt をこれらのフィルターと共に使うことは避けてください。
y = filtfilt(d,x)d を使用して入力データ x をフィルター処理します。d を周波数応答仕様に基づいて生成するには、関数 designfilt を使用します。
y = filtfilt(B,A,x,"ctf")B と分母係数 A によって定義されるCascaded Transfer Functions (CTF) を使用し、入力データ x をゼロ位相でフィルター処理します。 (R2024b 以降)
メモ
A をスカラーまたはベクトルとして指定する場合、B が 2 次セクション行列入力 sos から取得した 6 列の CTF 分子行列であることを明確にするため、"ctf" オプションを指定します。
y = filtfilt(___,Name=Value)
例
ゼロ位相フィルター処理は、フィルター処理された時間波形の特徴を、フィルター処理されていない信号で現れる場所にそのまま保持する上で役立ちます。
合成心電図 (ECG) 波形をゼロ位相フィルター処理します。波形を生成する関数は、例の最後にあります。QRS 群は心電図波形の重要な特徴です。この例では時点 160 あたりから始まっています。
wform = ecg(500); plot(wform) axis([0 500 -1.25 1.25]) text(155,-0.4,"Q") text(180,1.1,"R") text(205,-1,"S")

心電図を加法性ノイズで乱します。再現可能な結果が必要な場合は、乱数発生器をリセットします。ローパス FIR 等リップル フィルターを作成し、ゼロ位相のフィルターと通常のフィルターの両方を使用してノイズの多い波形をフィルター処理します。
rng("default") x = wform' + 0.25*randn(500,1); d = designfilt("lowpassfir", ... PassbandFrequency=0.15,StopbandFrequency=0.2, ... PassbandRipple=1,StopbandAttenuation=60, ... DesignMethod="equiripple"); y = filtfilt(d,x); y1 = filter(d,x); tiledlayout("flow") nexttile plot([y y1]) title("Filtered Waveforms") legend(["Zero-phase Filtering" "Conventional Filtering"]) nexttile plot(wform) title("Original Waveform")

ゼロ位相フィルター処理では信号のノイズが低減し、QRS 群は元々の発生と同じ時点に保持されます。通常のフィルター処理では信号のノイズは低減しますが、QRS 群に遅延が生じます。
バタワース 2 次セクション フィルターを使用してフィルター処理を繰り返します。
d1 = designfilt("lowpassiir",FilterOrder=12, ... HalfPowerFrequency=0.15,DesignMethod="butter"); y = filtfilt(d1,x); figure plot(x) hold on plot(y,LineWidth=3) hold off legend(["Noisy ECG" "Zero-Phase Filtering"])

この関数は ECG 波形を生成します。
function x = ecg(L) %ECG Electrocardiogram (ECG) signal generator. % ECG(L) generates a piecewise linear ECG signal of length L. % % EXAMPLE: % x = ecg(500).'; % y = sgolayfilt(x,0,3); % Typical values are: d=0 and F=3,5,9, etc. % y5 = sgolayfilt(x,0,5); % y15 = sgolayfilt(x,0,15); % plot(1:length(x),[x y y5 y15]); % Copyright 1988-2002 The MathWorks, Inc. a0 = [0,1,40,1,0,-34,118,-99,0,2,21,2,0,0,0]; % Template d0 = [0,27,59,91,131,141,163,185,195,275,307,339,357,390,440]; a = a0/max(a0); d = round(d0*L/d0(15)); % Scale them to fit in length L d(15)=L; for i=1:14 m = d(i):d(i+1)-1; slope = (a(i+1)-a(i))/(d(i+1)-d(i)); x(m+1) = a(i)+slope*(m-d(i)); end end
R2024b 以降
カスケード型伝達関数を使用して、ゼロ位相フィルター処理を実行します。
通過帯域リップルと阻止帯域の減衰量がそれぞれ 0.1 dB と 40 dB である楕円フィルターを設計します。サンプル レート 2000 Hz を指定します。フィルターの周波数応答をプロットします。
Fs = 2000; [B,A] = ellip(20,0.1,40,[0.3 0.7],"ctf"); freqz(B,A,2048,Fs,"ctf")

1 秒でナイキスト周波数に達する線形スイープ チャープ信号をフィルター処理します。入力信号と出力信号のスペクトルを比較します。
t = 0:1/Fs:1;
x = chirp(t,0,t(end),Fs/2)';
y = filtfilt(B,A,x,"ctf");
pspectrum([x y],Fs,Leakage=1,FrequencyResolution=1)
R2024b 以降
伝達関数によるゼロ位相フィルター処理を使用して、ノイズの多い正弦波アーティファクトを再作成します。CTF とスケール値を使用して、振動信号をフィルター処理します。
正規分布ノイズと 3 つの正弦波形で構成される信号 u を作成します。サンプル レートは 1 kHz です。
rng("default")
Fs = 1e3;
ts = (0:1/Fs:2)';
a0 = [3 2 1];
f0 = [0.1 0.5 0.9]*Fs/2;
p0 = [0 pi/4 pi/2];
u = 0.1*randn(size(ts)) + 0.1*sin(2*pi*f0.*ts+p0)*a0';3 次のバタワース バンドストップ デジタル フィルターで n0 をフィルター処理して信号 v を作成し、ノイズの多い正弦波アーティファクトを再作成します。
[b,a] = butter(3,[0.15 0.85],"stop");
v = filtfilt(b,a,u);u と v を比較します。両方の信号が同位相であることを確認します。
tiledlayout("flow") nexttile strips([u(ts<0.1) v(ts<0.1)],0.1,Fs) legend(["u" "v"],Location="southeast") xlabel("Time (seconds)") nexttile pspectrum([u v],Fs) legend(["u" "v"],Location="southeast")

電圧制御された振動信号 x を作成します。信号 v で表されるノイズの多い正弦波アーティファクトを追加します。
vo = exp(-2*abs(ts-1)).*sin(8*pi*ts); x = vco(vo,[0.25 0.75]*Fs/2,Fs) + v;
信号 x を 24 次のチェビシェフ II 型フィルターでフィルター処理します。CTF 形式とスケール値 (B,A,g) を使用します。
[B,A,g] = cheby2(24,50,[0.2 0.8],"ctf");
y = filtfilt({B,A,g},x);短時間フーリエ変換の振幅の 2 乗を比較します。阻止帯域で振幅が急激に減少するのを観察します。
tiledlayout("flow") nexttile stft(x,Fs,Window=bohmanwin(128),OverlapLength=120, ... FFTLength=512,FrequencyRange="onesided") title("Input x") nexttile stft(y,Fs,Window=bohmanwin(128),OverlapLength=120, ... FFTLength=512,FrequencyRange="onesided") title("Output y")

R2026a 以降
600 Hz まで 60 Hz 間隔で複数の高調波を含む複素数値の 30 Hz 正弦波トーンに対して、ゼロ位相フィルター処理を適用します。
サンプル レート 600 Hz で 2 秒間の複素数値信号を生成します。この信号は、10 V、30 Hz の正弦波トーンで構成され、60 Hz から 600 Hz まで等間隔に分布する 10 個の高調波を含み、各高調波の振幅は 1 V です。
Fs = 600; t = (0:1/Fs:2)'; x = 10*exp(1i*2*pi*30*t) + sum(exp(1i*2*pi*60*t*(0:9)),2);
トーンは 30 Hz で振動し、不要成分は 60 Hz 間隔でその 10 倍まで周波数のピークをもつため、対象信号であるトーンを復元するには、10 次の IIR 櫛形ノッチ フィルターが適しています。
b と a を、品質係数 35 の 10 次 IIR 櫛形ノッチ フィルターの分子係数および分母係数を表すベクトルとして定義します。特定の次数および品質係数をもつ IIR 櫛形フィルターの設計の詳細については、iircomb (DSP System Toolbox)を参照してください。
b = [0.957 zeros(1,9) -0.957]; a = [1 zeros(1,9) -0.914];
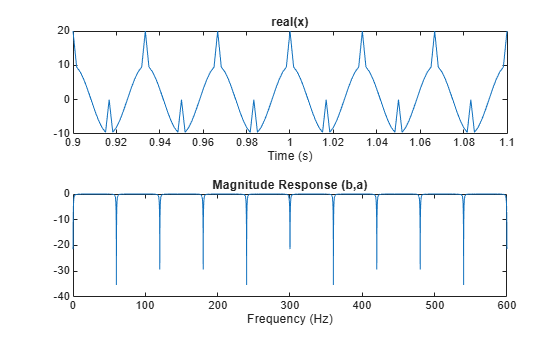
信号の実数部を 0.9 秒から 1.1 秒までの範囲でプロットします。フィルター応答を 0 Hz から 600 Hz までの範囲でプロットします。
tiledlayout("flow") nexttile plot(t,real(x)) xlim([0.9 1.1]) xlabel("Time (s)") title("real(x)") nexttile [h,f] = freqz(b,a,8192,"whole",Fs); plot(f,mag2db(abs(h))) xlabel("Frequency (Hz)") title("Magnitude Response (b,a)")
位相を保持したまま入力信号をフィルター処理します。Gustafsson の手法を使用して、フィルター状態の初期条件を推定します。過渡長を信号長に等しいと仮定し、入力信号はそのサンプルをミラーリングしてパディングします。
y = filtfilt(b,a,x, ... InitialStatesMethod="gustafsson", ... TransientLength=length(x), ... PaddingPattern="reflect");
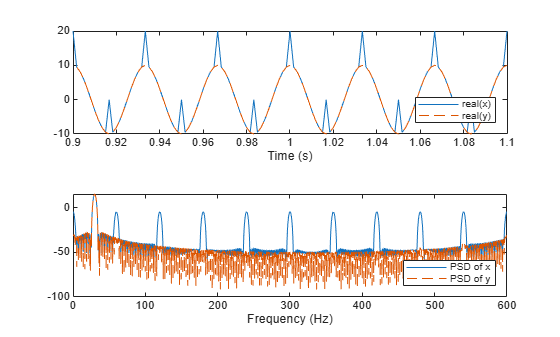
入力信号とフィルター処理後の信号を、時間領域と周波数領域で比較します。両方の信号の実数部を 0.9 秒から 1.1 秒までの範囲で、ウェルチのパワー スペクトルを 0 Hz から 600 Hz までの範囲でプロットします。フィルター処理後の信号は高調波が除去された 30 Hz のトーンを示し、フィルター処理後の信号 y は入力信号 x と同相です。
figure; tiledlayout("vertical") nexttile plot(t,real(x),t,real(y),"--") legend("real(" + ["x" "y"] +")",Location="southeast") xlabel("Time (s)") xlim([0.9 1.1]) nexttile [p,f] = pwelch([x y],[],[],8192,Fs); pdb = pow2db(abs(p)); plot(f,pdb(:,1),"-",f,pdb(:,2),"--") xlabel("Frequency (Hz)") legend("PSD of " + ["x" "y"],Location="southeast")
入力引数
名前と値の引数
出力引数
詳細
ヒント
スケーリング ゲインを含むフィルターを CTF 形式で取得できます。butter、cheby1、cheby2、ellip などのデジタル IIR フィルター設計関数の出力を使用します。これらの関数で、"ctf" フィルタータイプ引数を指定し、スケール値を取得するために B、A、g を返すように指定します。 (R2024b 以降)
参照
[1] Gustafsson, F. “Determining the initial states in forward-backward filtering.” IEEE® Transactions on Signal Processing. Vol. 44, April 1996, pp. 988–992. https://doi.org/10.1109/78.492552.
[2] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.
[3] Mitra, Sanjit K. Digital Signal Processing. 2nd Ed. New York: McGraw-Hill, 2001.
[4] Oppenheim, Alan V., and Ronald W. Schafer, with John R. Buck. Discrete-Time Signal Processing. 2nd Ed. Upper Saddle River, NJ: Prentice Hall, 1999.