このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
Satellite
衛星内の衛星シナリオ
説明
Satellite は、衛星シナリオ オブジェクト内の衛星を定義します。
作成
satelliteScenario オブジェクトの satellite 関数を使用して Satellite オブジェクトを作成できます。
プロパティ
このプロパティは、satellite 関数を呼び出すときにのみ設定できます。satellite 関数を呼び出した後、このプロパティは読み取り専用になります。
衛星名。'Name' と文字列スカラー、文字列ベクトル、文字ベクトル、または文字ベクトルのセル配列で構成されるコンマ区切りのペアとして指定されます。
衛星を 1 つだけ追加する場合は、
Nameを文字列スカラーまたは文字ベクトルとして指定します。複数の衛星を追加する場合は、
Nameを文字列スカラー、文字ベクトル、文字列ベクトル、または文字ベクトルのセル配列として指定します。文字列スカラーまたは文字ベクトルとして追加されたすべての衛星には、同じ指定された名前が割り当てられます。文字列ベクトルまたは文字ベクトルのセル配列内の要素数は、追加される衛星の数と等しくなければなりません。各衛星には、ベクトルまたはセル配列から対応する名前が割り当てられます。
衛星シナリオに衛星を追加した場合のデフォルト値は、
ケプラーの軌道要素、 TLEファイル - 「衛星ID」。ここで、
IDは衛星シナリオによって割り当てられます。SEMアルマナックファイルまたは RINEX GPSナビゲーション データ - 「PRN:prnValue」。ここで、prnValue は、SEMアルマナックファイルで指定されている衛星の疑似ランダム ノイズ コードを示す整数です。
RINEX Galileo ナビゲーション データ - 「GAL Sat IF: id」。ここで、「id」は RINEX ナビゲーション データで定義された Galileo衛星の衛星ID です。
タイムテーブル - タイムテーブルオブジェクトの変数名
Timeseries - 入力されている場合は Timeseries オブジェクトの名前、そうでない場合は「衛星 ID」。ID は衛星シナリオによって割り当てられます。
データ型: string
このプロパティはシミュレータによって内部的に設定され、読み取り専用です。
Satellite シミュレータによって割り当てられた ID。正のスカラーとして指定されます。
このプロパティは、conicalSensor を呼び出すときにのみ設定できます。conicalSensor 関数を呼び出した後、このプロパティは読み取り専用になります。
Satellite に取り付けられたコニカル センサー。コニカル センサーの行ベクトルとして指定されます。
このプロパティは、transmitter 関数を呼び出すときにのみ設定できます。transmitter 関数を呼び出した後、このプロパティは読み取り専用になります。
Satellite に接続された送信機。Transmitter オブジェクトの行ベクトルとして指定されます。
このプロパティは、access を呼び出すときにのみ設定できます。access を呼び出した後、このプロパティは読み取り専用になります。
アクセス解析オブジェクト。Access オブジェクトの行ベクトルとして指定されます。
このプロパティは、groundTrack を呼び出すときにのみ設定できます。groundTrack を呼び出した後、このプロパティは読み取り専用になります。
Satellite のグラウンド トラック。GroundTrack オブジェクトの行ベクトルとして指定されます。
このプロパティは、coordinateAxes を呼び出すときにのみ設定できます。coordinateAxes を呼び出した後、このプロパティは読み取り専用になります。
座標軸トライアドグラフィック オブジェクト。CoordinateAxes オブジェクトとして指定されます。
このプロパティは、satellite オブジェクトの作成時に設定することができ、その後このプロパティは読み取り専用になります。
衛星の位置と速度を伝播するために使用される軌道プロパゲーターの名前。次のいずれかのオプションとして指定します。
timetable、table、
timeseries、またはtscollectionを使用して衛星を指定する場合、OrbitPropagatorの値は"ephemeris"になります。SEMアルマナックファイルまたはGPSナビゲーション メッセージを含む RINEX データを使用して衛星を指定する場合、
OrbitPropagator値は次のいずれかのオプションを取ることができます。"gps"(既定)"sgp4""sdp4""two-body-keplerian""numerical"
Galileo ナビゲーション メッセージを含む RINEX データを使用して衛星を指定する場合、
OrbitPropagator値は次のいずれかのオプションを取ることができます。"galileo"(既定)"sgp4""sdp4""two-body-keplerian""numerical"
ケプラー要素を使用して衛星を追加するように指定する場合、
OrbitPropagator値はこれらのオプションのいずれかを取ることができます。"two-body-keplerian""sgp4""sdp4""numerical"
さらに、長半径が負の場合、
OrbitPropagatorの値は"numerical"のみになります。長半径が正の場合、デフォルト値は、周期が 225 分未満の場合は"sgp4"、周期が 225 分以上の場合は"sdp4"になります。TLEまたは OMM ファイルを使用して衛星を指定する場合、
OrbitPropagator値はこれらのオプションのいずれかを取ることができます。"two-body-keplerian""sgp4""sdp4""numerical"
軌道周期が 225 分未満の場合、デフォルトの
OrbitPropagator値は"sgp4"になります。それ以外の場合、デフォルトのOrbitPropagator値は"sdp4"になります。Keplerian要素を使用して衛星を指定する場合、OrbitPropagator値はこれらのオプションのいずれかを取ることができます。"two-body-keplerian""sgp4""sdp4"
RINEX データに有効なGPSと Galileo ナビゲーション メッセージの両方が含まれている場合、名前値引数を使用して OrbitPropagator を "gps" または "galileo" として指定することはできません。ただし、"two-body-keplerian"、"sgp4"、"sdp4"、または "numerical" として指定することもできます。
マーカーの色。'MarkerColor' と RGB トリプレット、または色名の文字文字列または文字ベクトルのいずれかで構成されるコンマ区切りのペアとして指定します。
カスタム色を使用する場合は、RGB 3 成分または 16 進数カラー コードを指定します。
RGB 3 成分は、色の赤、緑、青成分の強度値を指定する 3 要素の行ベクトルです。強度値は
[0,1]の範囲でなければなりません。たとえば[0.4 0.6 0.7]のようになります。16 進数カラー コードは、ハッシュ記号 (
#) で始まり、3 桁または 6 桁の0からFまでの範囲の 16 進数が続く string スカラーまたは文字ベクトルです。これらの値では大文字小文字は区別されません。したがって、カラー コード"#FF8800"、"#ff8800"、"#F80"、および"#f80"は等価です。
あるいは、名前を使用して一部の一般的な色を指定できます。次の表に、名前の付いた色オプション、等価の RGB 3 成分、および 16 進数カラー コードを示します。
| 色名 | 省略名 | RGB 3 成分 | 16 進数カラー コード | 外観 |
|---|---|---|---|---|
"red" | "r" | [1 0 0] | "#FF0000" |
|
"green" | "g" | [0 1 0] | "#00FF00" |
|
"blue" | "b" | [0 0 1] | "#0000FF" |
|
"cyan" | "c" | [0 1 1] | "#00FFFF" |
|
"magenta" | "m" | [1 0 1] | "#FF00FF" |
|
"yellow" | "y" | [1 1 0] | "#FFFF00" |
|
"black" | "k" | [0 0 0] | "#000000" |
|
"white" | "w" | [1 1 1] | "#FFFFFF" |
|








MATLAB® の多くのタイプのプロットで使用されている既定の色の RGB 3 成分および 16 進数カラー コードを次に示します。
| RGB 3 成分 | 16 進数カラー コード | 外観 |
|---|---|---|
[0 0.4470 0.7410] | "#0072BD" |
|
[0.8500 0.3250 0.0980] | "#D95319" |
|
[0.9290 0.6940 0.1250] | "#EDB120" |
|
[0.4940 0.1840 0.5560] | "#7E2F8E" |
|
[0.4660 0.6740 0.1880] | "#77AC30" |
|
[0.3010 0.7450 0.9330] | "#4DBEEE" |
|
[0.6350 0.0780 0.1840] | "#A2142F" |
|
![Sample of RGB triplet [0 0.4470 0.7410], which appears as dark blue](colororder1.png)
![Sample of RGB triplet [0.8500 0.3250 0.0980], which appears as dark orange](colororder2.png)
![Sample of RGB triplet [0.9290 0.6940 0.1250], which appears as dark yellow](colororder3.png)
![Sample of RGB triplet [0.4940 0.1840 0.5560], which appears as dark purple](colororder4.png)
![Sample of RGB triplet [0.4660 0.6740 0.1880], which appears as medium green](colororder5.png)
![Sample of RGB triplet [0.3010 0.7450 0.9330], which appears as light blue](colororder6.png)
![Sample of RGB triplet [0.6350 0.0780 0.1840], which appears as dark red](colororder7.png)
マーカーのサイズ。'MarkerSize' と 30 未満の実数の正のスカラーで構成されるコンマ区切りのペアとして指定します。単位はピクセルです。
Satellite ラベルの可視性の状態。'ShowLabel' と、1 (true) または 0 (false) の数値または論理値で構成されるコンマ区切りのペアとして指定されます。
データ型: logical
Satellite ラベルのフォント色。'LabelFontColor' と RGB トリプレットまたは色名の文字列または文字ベクトルのいずれかで構成されるコンマ区切りのペアとして指定します。
カスタム色を使用する場合は、RGB 3 成分または 16 進数カラー コードを指定します。
RGB 3 成分は、色の赤、緑、青成分の強度値を指定する 3 要素の行ベクトルです。強度値は
[0,1]の範囲でなければなりません。たとえば[0.4 0.6 0.7]のようになります。16 進数カラー コードは、ハッシュ記号 (
#) で始まり、3 桁または 6 桁の0からFまでの範囲の 16 進数が続く string スカラーまたは文字ベクトルです。これらの値では大文字小文字は区別されません。したがって、カラー コード"#FF8800"、"#ff8800"、"#F80"、および"#f80"は等価です。
あるいは、名前を使用して一部の一般的な色を指定できます。次の表に、名前の付いた色オプション、等価の RGB 3 成分、および 16 進数カラー コードを示します。
| 色名 | 省略名 | RGB 3 成分 | 16 進数カラー コード | 外観 |
|---|---|---|---|---|
"red" | "r" | [1 0 0] | "#FF0000" |
|
"green" | "g" | [0 1 0] | "#00FF00" |
|
"blue" | "b" | [0 0 1] | "#0000FF" |
|
"cyan" | "c" | [0 1 1] | "#00FFFF" |
|
"magenta" | "m" | [1 0 1] | "#FF00FF" |
|
"yellow" | "y" | [1 1 0] | "#FFFF00" |
|
"black" | "k" | [0 0 0] | "#000000" |
|
"white" | "w" | [1 1 1] | "#FFFFFF" |
|
MATLAB の多くのタイプのプロットで使用されている既定の色の RGB 3 成分および 16 進数カラー コードを次に示します。
| RGB 3 成分 | 16 進数カラー コード | 外観 |
|---|---|---|
[0 0.4470 0.7410] | "#0072BD" |
|
[0.8500 0.3250 0.0980] | "#D95319" |
|
[0.9290 0.6940 0.1250] | "#EDB120" |
|
[0.4940 0.1840 0.5560] | "#7E2F8E" |
|
[0.4660 0.6740 0.1880] | "#77AC30" |
|
[0.3010 0.7450 0.9330] | "#4DBEEE" |
|
[0.6350 0.0780 0.1840] | "#A2142F" |
|
Satelliteラベルのフォントサイズ。'LabelFontSize'と[6 30]の範囲の正のスカラーで構成されるコンマ区切りのペアとして指定します。
ビューアーでレンダリングするビジュアル 3D モデル ファイルの名前。拡張子が .GLTF、.GLB、または .STL の文字文字列として指定します。GLB および GLTF モデルの場合、gITF は右手座標系を使用します。gITF は、+Y を上、+Z を前、-X を右と定義します。gITF アセットは +Z に面しています。詳細については、https://registry.khronos.org/glTF/specs/2.0/glTF-2.0.html#coordinate-system-and-units を参照してください。GLB のメッシュはメートル単位です。

データ型: string
ビューアでレンダリングされるビジュアル 3D モデルの線形スケーリング。負でない整数として指定します。スケーリングでは、GLB モデルがメートル単位であることを前提としています。
データ型: double
オブジェクト関数
access | サテライトシナリオにアクセス解析オブジェクトを追加する |
aer | NEDフレーム内の他の衛星または地上局の方位角角、仰角、範囲を計算します。 |
dopplershift | 衛星シナリオにおけるターゲット アセットのドップラーシフトを計算する |
latency | Calculate propagation delay from one asset to another asset |
conicalSensor | 衛星シナリオにコニカル センサーを追加する |
gimbal | 衛星、プラットフォーム、地上局にジンバルを追加する |
groundTrack | シナリオ内の衛星またはプラットフォームにグラウンド トラックオブジェクトを追加する |
orbitalElements | シナリオにおける衛星の軌道要素 |
coordinateAxes | 衛星シナリオ アセットの座標軸トライアドを可視化する |
pointAt | 衛星をターゲットに向ける |
receiver | Add receiver to satellite scenario |
transmitter | Add transmitter to satellite scenario |
states | 衛星またはプラットフォームの位置と速度を取得する |
show | 衛星シナリオビューアでオブジェクトを表示する |
hide | 衛星シナリオエンティティをビューアーから非表示にする |
例
衛星シナリオ オブジェクトを作成します。
startTime = datetime(2020,5,5,0,0,0);
stopTime = startTime + days(1);
sampleTime = 60; %seconds
sc = satelliteScenario(startTime,stopTime,sampleTime);TLEファイルからシナリオに衛星を追加します。
tleFile = "eccentricOrbitSatellite.tle"; sat1 = satellite(sc,tleFile,"Name","Sat1")
sat1 =
Satellite with properties:
Name: Sat1
ID: 1
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Gimbals: [1x0 matlabshared.satellitescenario.Gimbal]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
Accesses: [1x0 matlabshared.satellitescenario.Access]
GroundTrack: [1x1 matlabshared.satellitescenario.GroundTrack]
Orbit: [1x1 matlabshared.satellitescenario.Orbit]
OrbitPropagator: sdp4
MarkerColor: [0.059 1 1]
MarkerSize: 6
ShowLabel: true
LabelFontColor: [1 1 1]
LabelFontSize: 15
ケプラー要素から衛星をシナリオに追加し、その軌道プロパゲーターを「2 体ケプラー」として指定します。
semiMajorAxis = 6878137; %m eccentricity = 0; inclination = 20; %degrees rightAscensionOfAscendingNode = 0; %degrees argumentOfPeriapsis = 0; %degrees trueAnomaly = 0; %degrees sat2 = satellite(sc,semiMajorAxis,eccentricity,inclination,rightAscensionOfAscendingNode,... argumentOfPeriapsis,trueAnomaly,"OrbitPropagator","two-body-keplerian","Name","Sat2")
sat2 =
Satellite with properties:
Name: Sat2
ID: 2
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Gimbals: [1x0 matlabshared.satellitescenario.Gimbal]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
Accesses: [1x0 matlabshared.satellitescenario.Access]
GroundTrack: [1x1 matlabshared.satellitescenario.GroundTrack]
Orbit: [1x1 matlabshared.satellitescenario.Orbit]
OrbitPropagator: two-body-keplerian
MarkerColor: [0.059 1 1]
MarkerSize: 6
ShowLabel: true
LabelFontColor: [1 1 1]
LabelFontSize: 15
2 つの衛星間のアクセス解析を追加します。
ac = access(sat1,sat2);
2 つの衛星間の視線が通る時間を決定します。
accessIntervals(ac)
ans=15×8 table
Source Target IntervalNumber StartTime EndTime Duration StartOrbit EndOrbit
______ ______ ______________ ____________________ ____________________ ________ __________ ________
"Sat1" "Sat2" 1 05-May-2020 00:09:00 05-May-2020 01:08:00 3540 1 1
"Sat1" "Sat2" 2 05-May-2020 01:50:00 05-May-2020 02:47:00 3420 1 1
"Sat1" "Sat2" 3 05-May-2020 03:45:00 05-May-2020 04:05:00 1200 1 1
"Sat1" "Sat2" 4 05-May-2020 04:32:00 05-May-2020 05:26:00 3240 1 1
"Sat1" "Sat2" 5 05-May-2020 06:13:00 05-May-2020 07:10:00 3420 1 1
"Sat1" "Sat2" 6 05-May-2020 07:52:00 05-May-2020 08:50:00 3480 1 1
"Sat1" "Sat2" 7 05-May-2020 09:30:00 05-May-2020 10:29:00 3540 1 1
"Sat1" "Sat2" 8 05-May-2020 11:09:00 05-May-2020 12:07:00 3480 1 2
"Sat1" "Sat2" 9 05-May-2020 12:48:00 05-May-2020 13:46:00 3480 2 2
"Sat1" "Sat2" 10 05-May-2020 14:31:00 05-May-2020 15:27:00 3360 2 2
"Sat1" "Sat2" 11 05-May-2020 17:12:00 05-May-2020 18:08:00 3360 2 2
"Sat1" "Sat2" 12 05-May-2020 18:52:00 05-May-2020 19:49:00 3420 2 2
"Sat1" "Sat2" 13 05-May-2020 20:30:00 05-May-2020 21:29:00 3540 2 2
"Sat1" "Sat2" 14 05-May-2020 22:08:00 05-May-2020 23:07:00 3540 2 2
"Sat1" "Sat2" 15 05-May-2020 23:47:00 06-May-2020 00:00:00 780 2 2
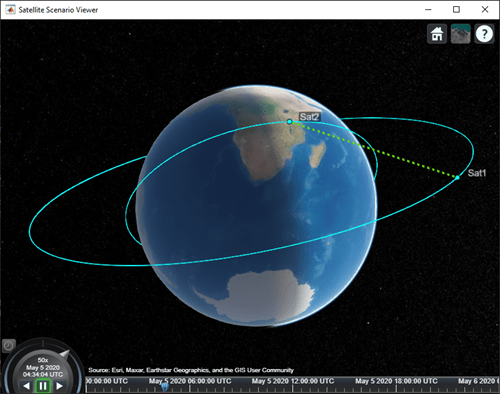
衛星間の視線を可視化します。
play(sc);
衛星シナリオを設定します。
startTime = datetime(2021,8,5);
stopTime = startTime + days(1);
sampleTime = 60; % seconds
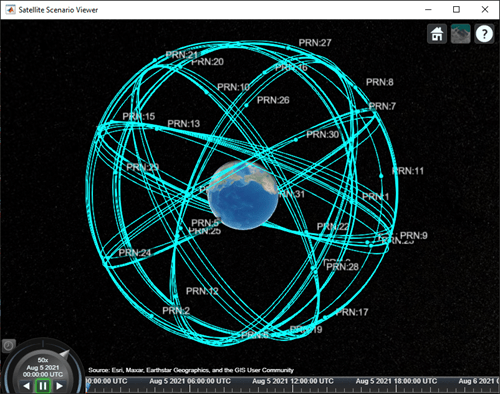
sc = satelliteScenario(startTime,stopTime,sampleTime);SEMアルマナックファイルからシナリオに衛星を追加します。
sat = satellite(sc,"gpsAlmanac.txt","OrbitPropagator","gps");
GPS コンステレーションを可視化します。
v = satelliteScenarioViewer(sc);
参照
[1] Hoots, Felix R., and Ronald L. Roehrich. Models for propagation of NORAD element sets. Aerospace Defense Command Peterson AFB CO Office of Astrodynamics, 1980.
[2] Vallado, David, et al. “Revisiting Spacetrack Report #3.” AIAA/AAS Astrodynamics Specialist Conference and Exhibit, American Institute of Aeronautics and Astronautics, 2006, https://doi.org/10.2514/6.2006-6753
バージョン履歴
R2021a で導入
参考
オブジェクト
satelliteScenario|GroundStation|Access|satelliteScenarioViewer|Eclipse(Aerospace Toolbox) |Platform