このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
conicalSensor
衛星シナリオにコニカル センサーを追加する
説明
conicalSensor( は、デフォルトのパラメーターを使用して、ベクトル parent)parent 内の各親に ConicalSensor オブジェクトを追加します。parent は、Satellite、GroundStation、Platform、または Gimbal になります。
conicalSensor( は、オプションの名前と値の引数で指定された追加のパラメーターを使用して、parent,Name=Value)parent の親にコニカル センサーを追加します。たとえば、'MaxViewAngle'=90 は視野角 90 度を指定します。
sensor = conicalSensor(___)sensor として返します。前の構文からの任意の入力引数の組み合わせを指定します。
例
開始時刻が 2021 年 6 月 15 日午前 8 時 55 分 UTC、終了時刻が 5 日後の衛星シナリオを作成します。シミュレーションのサンプル時間を 60 秒に設定します。
startTime = datetime(2021,6,21,8,55,0);
stopTime = startTime + days(5);
sampleTime = 60; % seconds
sc = satelliteScenario(startTime,stopTime,sampleTime)sc =
satelliteScenario with properties:
StartTime: 21-Jun-2021 08:55:00
StopTime: 26-Jun-2021 08:55:00
SampleTime: 60
AutoSimulate: 1
Satellites: [1×0 matlabshared.satellitescenario.Satellite]
GroundStations: [1×0 matlabshared.satellitescenario.GroundStation]
Platforms: [1×0 matlabshared.satellitescenario.Platform]
Viewers: [0×0 matlabshared.satellitescenario.Viewer]
AutoShow: 1
ケプラーの軌道要素を使用して、シナリオに衛星を追加します。
semiMajorAxis = 7878137; % meters eccentricity = 0; inclination = 50; % degrees rightAscensionOfAscendingNode = 0; % degrees argumentOfPeriapsis = 0; % degrees trueAnomaly = 50; % degrees sat = satellite(sc,semiMajorAxis,eccentricity,inclination,rightAscensionOfAscendingNode, ... argumentOfPeriapsis,trueAnomaly)
sat =
Satellite with properties:
Name: Satellite 1
ID: 1
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Gimbals: [1x0 matlabshared.satellitescenario.Gimbal]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
Accesses: [1x0 matlabshared.satellitescenario.Access]
Eclipse: [1x0 Aero.satellitescenario.Eclipse]
GroundTrack: [1x1 matlabshared.satellitescenario.GroundTrack]
Orbit: [1x1 matlabshared.satellitescenario.Orbit]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
OrbitPropagator: sgp4
MarkerColor: [0.059 1 1]
MarkerSize: 6
ShowLabel: true
LabelFontColor: [1 1 1]
LabelFontSize: 15
Visual3DModel:
Visual3DModelScale: 1
撮影する場所を表す地上局をシナリオに追加します。
gs = groundStation(sc,Name="Location to Photograph", ... Latitude=42.3001,Longitude=-71.3504) % degrees
gs =
GroundStation with properties:
Name: Location to Photograph
ID: 2
Latitude: 42.3001 degrees
Longitude: -71.3504 degrees
Altitude: 0 meters
MinElevationAngle: 0 degrees
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Gimbals: [1x0 matlabshared.satellitescenario.Gimbal]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
Accesses: [1x0 matlabshared.satellitescenario.Access]
Eclipse: [1x0 Aero.satellitescenario.Eclipse]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
MarkerColor: [1 0.4118 0.1608]
MarkerSize: 6
ShowLabel: true
LabelFontColor: [1 1 1]
LabelFontSize: 15
衛星にジンバルを追加します。このジンバルは衛星とは独立して操縦できます。
g = gimbal(sat)
g =
Gimbal with properties:
Name: Gimbal 3
ID: 3
MountingLocation: [0; 0; 0] meters
MountingAngles: [0; 0; 0] degrees
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
ジンバルを使用して撮影する場所を追跡します。
pointAt(g,gs);
ジンバルにコニカル センサーを追加します。このセンサーはカメラを表します。視野を60度に設定します。
camSensor = conicalSensor(g,MaxViewAngle=60)
camSensor =
ConicalSensor with properties:
Name: Conical sensor 4
ID: 4
MountingLocation: [0; 0; 0] meters
MountingAngles: [0; 0; 0] degrees
MaxViewAngle: 60 degrees
Accesses: [1x0 matlabshared.satellitescenario.Access]
FieldOfView: [0x0 matlabshared.satellitescenario.FieldOfView]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
カメラと撮影場所の間にあるコニカル センサーにアクセス解析を追加します。
ac = access(camSensor,gs)
ac =
Access with properties:
Sequence: [4 2]
LineWidth: 3
LineColor: [0.3922 0.8314 0.0745]
衛星シナリオ ビューアーを使用して、カメラの視野を可視化します。
v = satelliteScenarioViewer(sc); fieldOfView(camSensor);
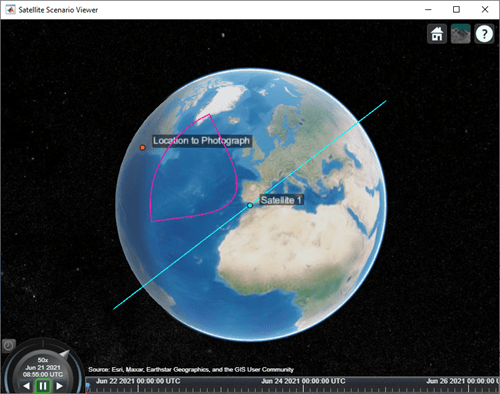
カメラが地理的サイトを視認できる間隔を決定します。
t = accessIntervals(ac)
t=35×8 table
Source Target IntervalNumber StartTime EndTime Duration StartOrbit EndOrbit
__________________ ________________________ ______________ ____________________ ____________________ ________ __________ ________
"Conical sensor 4" "Location to Photograph" 1 21-Jun-2021 10:38:00 21-Jun-2021 10:55:00 1020 1 2
"Conical sensor 4" "Location to Photograph" 2 21-Jun-2021 12:36:00 21-Jun-2021 12:58:00 1320 2 3
"Conical sensor 4" "Location to Photograph" 3 21-Jun-2021 14:37:00 21-Jun-2021 15:01:00 1440 3 4
"Conical sensor 4" "Location to Photograph" 4 21-Jun-2021 16:41:00 21-Jun-2021 17:04:00 1380 5 5
"Conical sensor 4" "Location to Photograph" 5 21-Jun-2021 18:44:00 21-Jun-2021 19:07:00 1380 6 6
"Conical sensor 4" "Location to Photograph" 6 21-Jun-2021 20:46:00 21-Jun-2021 21:08:00 1320 7 7
"Conical sensor 4" "Location to Photograph" 7 21-Jun-2021 22:50:00 21-Jun-2021 23:04:00 840 8 8
"Conical sensor 4" "Location to Photograph" 8 22-Jun-2021 09:51:00 22-Jun-2021 10:02:00 660 13 13
"Conical sensor 4" "Location to Photograph" 9 22-Jun-2021 11:46:00 22-Jun-2021 12:07:00 1260 14 15
"Conical sensor 4" "Location to Photograph" 10 22-Jun-2021 13:46:00 22-Jun-2021 14:10:00 1440 15 16
"Conical sensor 4" "Location to Photograph" 11 22-Jun-2021 15:49:00 22-Jun-2021 16:13:00 1440 16 17
"Conical sensor 4" "Location to Photograph" 12 22-Jun-2021 17:53:00 22-Jun-2021 18:16:00 1380 18 18
"Conical sensor 4" "Location to Photograph" 13 22-Jun-2021 19:55:00 22-Jun-2021 20:18:00 1380 19 19
"Conical sensor 4" "Location to Photograph" 14 22-Jun-2021 21:58:00 22-Jun-2021 22:16:00 1080 20 20
"Conical sensor 4" "Location to Photograph" 15 23-Jun-2021 10:56:00 23-Jun-2021 11:16:00 1200 26 27
"Conical sensor 4" "Location to Photograph" 16 23-Jun-2021 12:56:00 23-Jun-2021 13:19:00 1380 27 28
⋮
最大再訪問時間を時間単位で計算します。
startTimes = t.StartTime;
endTimes = t.EndTime;
revisitTimes = hours(startTimes(2:end) - endTimes(1:end-1));
maxRevisitTime = max(revisitTimes) % hoursmaxRevisitTime = 12.666666666666666
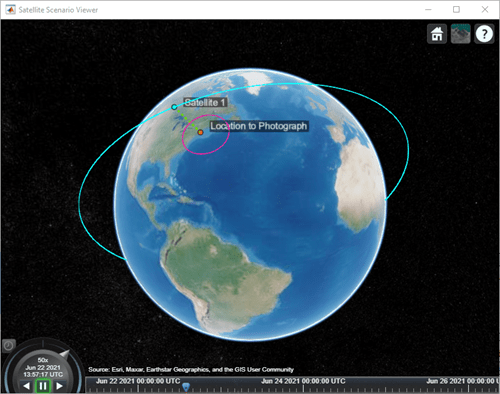
カメラがその場所を撮影した再訪問時間を可視化します。
play(sc);
入力引数
名前と値の引数
出力引数
バージョン履歴
R2021a で導入