このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
platform
構文
説明
platform( は、scenario,trajectory)geoTrajectory システム オブジェクトからの軌跡を使用して、衛星シナリオに Platform オブジェクトを追加します。
platform( は、位置データから衛星シナリオに scenario,positiontable)Platform オブジェクトを追加します。位置データはメートル単位です。
platform( は、位置と速度データから衛星シナリオに scenario,positiontable,velocitytable)Platform オブジェクトを追加します。位置データはメートル単位、速度データはメートル/秒単位です。
platform( は、scenario,positiontimeseries)positiontimeseries (timeseries オブジェクト) で指定された位置 (メートル単位) データから、衛星シナリオに Platform オブジェクトを追加します。
platform( は、scenario,positiontimeseries,velocitytimeseries)positiontimeseries (timeseries オブジェクト) で指定された位置 (メートル単位) データと、velocitytimeseries (timeseries オブジェクト) で指定された速度 (メートル/秒単位) データから、衛星シナリオに Platform オブジェクトを追加します。
platform(___, は、以前の構文の任意の入力引数の組み合わせに加えて、1 つ以上の名前と値の引数を使用してオプションを指定します。 Name,Value)
pltf = platform(___)Platform オブジェクト プラットフォームを追加し、これらのプラットフォームへのハンドルのベクトルを返します。
メモ
satelliteScenario の AutoSimulate プロパティが false の場合、プラットフォームの呼び出し時に SimulationStatus は NotStarted になります。restart 関数を使用して SimulationStatus を NotStarted にリセットできます。restart を呼び出すとシミュレーション データが消去されることに注意してください。
例
satelliteScenario を使用してシナリオを作成します。
sc = satelliteScenario(); viewer = satelliteScenarioViewer(sc);
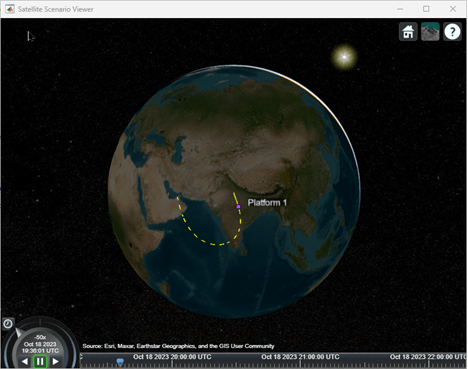
デリー国際空港から離陸し、バンガロール上空を飛行してドバイに着陸する航空機を考えてみます。合計飛行時間は3時間です。 geoTrajectory を使用して軌跡を作成します。
trajectory = geoTrajectory([28.5567,77.1006,10600;13.1989,77.7068,30600;25.2566,55.3641,5600],[0,3600,3*3600],AutoPitch=true,AutoBank=true);
軌跡に基づいて衛星シナリオにプラットフォームを追加します。
pltf = platform(sc,trajectory)
pltf =
Platform with properties:
Name: Platform 1
ID: 1
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Gimbals: [1x0 matlabshared.satellitescenario.Gimbal]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
Accesses: [1x0 matlabshared.satellitescenario.Access]
Eclipse: [1x0 Aero.satellitescenario.Eclipse]
GroundTrack: [1x1 matlabshared.satellitescenario.GroundTrack]
Path: [1x1 matlabshared.satellitescenario.Path]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
MarkerColor: [0.7176 0.2745 1]
MarkerSize: 6
ShowLabel: true
LabelFontColor: [1 1 1]
LabelFontSize: 15
Visual3DModel:
Visual3DModelScale: 1
hide(pltf.Path); show(pltf.GroundTrack);
ビューアーを再生します。
play(sc);
入力引数
名前と値の引数
オプションの引数のペアを Name1=Value1,...,NameN=ValueN として指定します。ここで、Name は引数名で、Value は対応する値です。名前と値の引数は他の引数の後に指定しなければなりませんが、ペアの順序は重要ではありません。
例: Name = 'MySatellite' は衛星名を 'MySatellite' に設定します。
姿勢データ。MATLAB timeseries オブジェクト、MATLAB timetable オブジェクト、または MATLAB table オブジェクトとして指定されます。
指定された姿勢が MATLAB timetable の場合:
pltfに単一のプラットフォームが含まれている場合、テーブルにはスカラー ファースト四元数[1 行 4 列] または ZYX オイラー角 [1 行 3 列] のデータ列が 1 つ含まれている必要があります。pltfがプラットフォームの配列である場合、各データ行には次のいずれかが含まれている必要があります。複数の列。各列には、時間の経過に伴う個々のプラットフォームのデータが含まれます。
2D データの 1 列。1 つの次元の長さは、オイラー角または四元数のどちらが使用されているかに応じて 3 または 4 に等しく、残りの次元の長さは
pltf内のプラットフォームの数に等しくなければなりません。3D データの 1 列。1 つの次元の長さは、オイラー角または四元数のどちらが使用されているかに応じて 3 または 4 に等しく、1 つの次元はシングルトンであり、残りの次元の長さは
pltf内のプラットフォームの数に等しくなければなりません。
指定された姿勢がスカラー四元数または ZYX オイラー角を含む MATLAB timeseries である場合は、次のようになります。
timeseriesのDataプロパティに 2 つの次元がある場合、オイラー角または四元数が使用されているかどうかに応じて、1 つの次元の長さは 3 または 4 に等しくなければならず、もう 1 つの次元は時間ベクトルの方向と揃っている必要があります。pltfがプラットフォームの配列である場合、timeseriesのDataプロパティは 3 次元でなければなりません。1 つの次元の長さは、オイラー角または四元数のどちらが使用されているかに応じて 3 または 4 に等しくなければならず、最初または最後の次元のいずれかが時間ベクトルの方向と揃う必要があり、残りの次元はpltf内のプラットフォームの数と揃う必要があります。
四元数の詳細については、quaternion を参照してください。
データ型: timeseries | table
ビューアーでレンダリングするビジュアル 3D モデル ファイルの名前。拡張子が .GLTF、.GLB、または .STL の文字文字列として指定します。GLB および GLTF モデルの場合、gITF は右手座標系を使用します。gITF は、+Y を上、+Z を前、-X を右と定義します。gITF アセットは +Z に面しています。詳細については、https://registry.khronos.org/glTF/specs/2.0/glTF-2.0.html#coordinate-system-and-units を参照してください。GLB のメッシュはメートル単位です。
メモ
このプロパティ NarrowBodyAirliner.glb を設定すると、航空機の 3D モデルを衛星シナリオ ビューアーに追加できます。

データ型: string
ビューアでレンダリングされるビジュアル 3D モデルの線形スケーリング。負でない整数として指定します。スケーリングでは、GLB モデルがメートル単位であることを前提としています。
データ型: double
出力引数
バージョン履歴
R2024a で導入