このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
geoTrajectory
説明
geoTrajectory System object™ は測地経緯度のウェイポイントに基づいて軌跡を生成します。System object を作成するときに、各ウェイポイントの到着時刻、速度、および方向を指定できます。geoTrajectory System object には 3 つの座標系が関係します。詳細については、Geo Trajectory の座標系を参照してください。
測地経緯度で地球中心のウェイポイント軌跡を生成するには:
geoTrajectoryオブジェクトを作成して、そのプロパティを設定します。関数と同様に、オブジェクトを呼び出します。
System object の機能の詳細については、System object とはを参照してください。
作成
構文
説明
trajectory = geoTrajectory(Waypoints,TimeOfArrival)Waypoints と対応する時間 TimeOfArrival に基づいて、geoTrajectory System object、trajectory を返します。
trajectory = geoTrajectory(Waypoints,TimeOfArrival,Name,Value)Name を指定された Value に設定します。指定されていないプロパティと作成引数には、既定値または推定値が設定されます。
例: trajectory = geoTrajectory([10,10,1000;10,11,1100],[0,3600]) は、1 時間で経度 1 度、高度100 メートル移動する測地ウェイポイント軌跡System object、geojectory を作成します。
作成引数
作成引数は、 System object の作成中に設定され、後で変更できないプロパティです。作成引数の値を明示的に設定しない場合は、プロパティ値が推測されます。
Waypoints と TimeOfArrival は、値のみの引数または名前と値のペアとして指定できます。
プロパティ
使用法
説明
[ は、指定された作成引数とプロパティに基づいて軌跡データのフレームを出力します。ここで、positionLLA,orientation,velocity,acceleration,angularVelocity,ecef2ref] = trajectory()trajectory は geoTrajectory オブジェクトです。
出力引数
オブジェクト関数
オブジェクト関数を使用するには、System object を最初の入力引数として指定します。たとえば、obj という名前の System object のシステム リソースを解放するには、以下の構文を使用します。
release(obj)
例
開始LLAが[15 15 0]で終了LLAが[75 75 100]であるgeoTrajectoryを作成します。飛行時間を10時間に設定します。1000 秒ごとに軌跡をサンプリングします。
startLLA = [15 15 0];
endLLA = [75 75 100];
timeOfTravel = [0 3600*10];
sampleRate = 0.001;
trajectory = geoTrajectory([startLLA;endLLA],timeOfTravel,'SampleRate',sampleRate);軌跡の LLAウェイポイントを出力します。
positionsLLA = startLLA; while ~isDone(trajectory) positionsLLA = [positionsLLA;trajectory()]; end positionsLLA
positionsLLA = 37×3
15.0000 15.0000 0
16.6667 16.6667 2.7778
18.3333 18.3333 5.5556
20.0000 20.0000 8.3333
21.6667 21.6667 11.1111
23.3333 23.3333 13.8889
25.0000 25.0000 16.6667
26.6667 26.6667 19.4444
28.3333 28.3333 22.2222
30.0000 30.0000 25.0000
31.6667 31.6667 27.7778
33.3333 33.3333 30.5556
35.0000 35.0000 33.3333
36.6667 36.6667 36.1111
38.3333 38.3333 38.8889
⋮
lookupPose 関数を使用して、ECEF フレーム内の軌跡の直交ウェイポイントを検索します。
sampleTimes = 0:1000:3600*10;
n = length(sampleTimes);
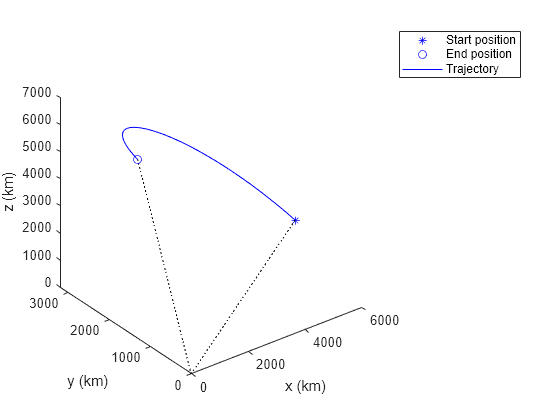
positionsCart = lookupPose(trajectory,sampleTimes,'ECEF');ECEF フレームで結果を可視化します。
figure() km = 1000; plot3(positionsCart(1,1)/km,positionsCart(1,2)/km,positionsCart(1,3)/km, 'b*'); hold on; plot3(positionsCart(end,1)/km,positionsCart(end,2)/km,positionsCart(end,3)/km, 'bo'); plot3(positionsCart(:,1)/km,positionsCart(:,2)/km,positionsCart(:,3)/km,'b'); plot3([0 positionsCart(1,1)]/km,[0 positionsCart(1,2)]/km,[0 positionsCart(1,3)]/km,'k:'); plot3([0 positionsCart(end,1)]/km,[0 positionsCart(end,2)]/km,[0 positionsCart(end,3)]/km,'k:'); xlabel('x (km)'); ylabel('y (km)'); zlabel('z (km)'); legend('Start position','End position', 'Trajectory')
アルゴリズム
geoTrajectory System object には 3 つの座標系が含まれます。
ECEF(地球中心地球固定)フレーム
ローカル基準座標系: ローカル NED (北東下) または ENU (東北上) フレーム
対象ボディ座標系
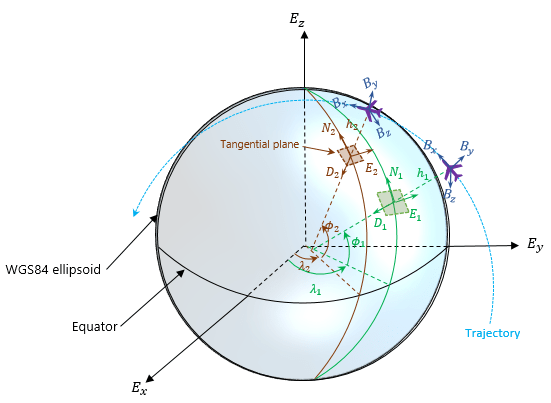
この図は、2 つのウェイポイントが強調表示された、地球を中心とした軌跡を示しています。図では例として NED ローカル基準座標系を使用していますが、ENU ローカル基準座標系を使用することもできます。この図で次のとおりです。
Ex、Ey、および Ez は、地球上に固定された ECEF フレームの 3 つの軸です。
Bx、By、および Bz は、ターゲットに固定されたターゲット ボディ座標系の 3 つの軸です。
N、E、D は、ローカル NED フレームの 3 つの軸です。この図は、2 つのローカル NED 基準座標系、N1-E1-D1 と N2-E2-D2 を強調表示しています。各ローカル NED フレームの原点は、WGS84 楕円体モデルに基づく軌跡ウェイポイントに対応する地球表面ポイントです。ローカル NED フレームの水平面は、WGS84 楕円体モデルの表面に接します。
λ と ϕ は、それぞれ測地経度と緯度です。NED ローカル座標系規則を使用したターゲットの方向は、ローカル NED 座標系からターゲットのボディ座標系への回転として定義されます。たとえば、N1-E1-D1 から Bx-By-Bz への回転などです。
拡張機能
バージョン履歴
R2024a で導入