このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
perturbations
構文
説明
perturbs = perturbations(obj,property,'Selection',values,probabilities)probabilities を持つ values のセットから抽出された property 摂動オフセットを定義します。
perturbs = perturbations(obj,property,'TruncatedNormal',mean,deviation,lowerLimit,upperLimit)mean、標準 deviation、下限、上限を持つ正規分布から抽出された property 摂動オフセットを定義します。
perturbs = perturbations(obj,property,'Custom',perturbFcn)perturbFcn を定義できます。
例
入力引数
出力引数
詳細
特定のプロパティに適用される摂動の分布を指定できます。
選択分布 - この関数は、関連付けられた確率を持つ指定された値の 1 つとして摂動オフセットを定義します。たとえば、値を
[1 2]と指定し、確率を[0.7 0.3]と指定すると、perturb関数は、確率0.7でプロパティにオフセット値1を追加し、確率0.3でプロパティにオフセット値2を追加します。いくつかの離散値を使用してプロパティを摂動したい場合にのみ、選択分布を使用します。正規分布 - この関数は、指定された平均と標準偏差 (または共分散) を持つ正規分布から抽出された値として摂動オフセットを定義します。正規分布は、ほとんどの場合にパラメーターの自然な摂動を模倣するため、最も一般的に使用される分布です。
切り捨て正規分布 - この関数は、指定された平均、標準偏差 (または共分散)、下限、上限を持つ切り捨て正規分布から抽出された値として摂動オフセットを定義します。正規分布とは異なり、切り捨て正規分布から抽出された値は下限と上限によって切り捨てられます。正規分布を適用するが、プロパティの有効な値が一定の範囲内に限定されている場合は、切り捨て正規分布を使用します。
均一分布 - この関数は、指定された最小値と最大値を持つ均一分布から抽出された値として摂動オフセットを定義します。間隔内のすべての値(最小値と最大値で指定)の実現確率は同じです。
カスタム分布 - 独自の摂動関数をカスタマイズします。関数の構文は次のようになります。
ここで、offset = myfun(propVal)
propValはpropertyの値であり、offsetはプロパティの摂動オフセットです。
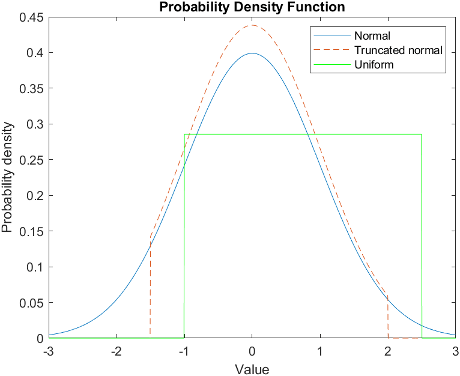
この図は、正規分布、切断正規分布、一様分布の確率密度関数をそれぞれ示しています。
バージョン履歴
R2024a で導入