このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
lookupPose
構文
説明
[ は、指定されたサンプル時間におけるウェイポイント軌跡の姿勢情報を返します。サンプル時間が軌跡の持続時間を超えている場合、対応する姿勢情報は position,orientation,velocity,acceleration,angularVelocity,ecef2ref] = lookupPose(traj,sampleTimes)NaN として返されます。
[___] = lookupPose( ではさらに、traj,sampleTimes,coordinateSystem)position 出力の形式を指定することもできます。
例
開始LLAが[15 15 0]、終了LLAが[75 75 100]のgeoTrajectoryを作成します。飛行時間を10時間に設定します。1000 秒ごとに軌跡をサンプリングします。
startLLA = [15 15 0];
endLLA = [75 75 100];
timeOfTravel = [0 3600*10];
sampleRate = 0.001;
trajectory = geoTrajectory([startLLA;endLLA],timeOfTravel,'SampleRate',sampleRate);軌跡の LLAウェイポイントを出力します。
positionsLLA = startLLA; while ~isDone(trajectory) positionsLLA = [positionsLLA;trajectory()]; end positionsLLA
positionsLLA = 37×3
15.0000 15.0000 0
16.6667 16.6667 2.7778
18.3333 18.3333 5.5556
20.0000 20.0000 8.3333
21.6667 21.6667 11.1111
23.3333 23.3333 13.8889
25.0000 25.0000 16.6667
26.6667 26.6667 19.4444
28.3333 28.3333 22.2222
30.0000 30.0000 25.0000
31.6667 31.6667 27.7778
33.3333 33.3333 30.5556
35.0000 35.0000 33.3333
36.6667 36.6667 36.1111
38.3333 38.3333 38.8889
⋮
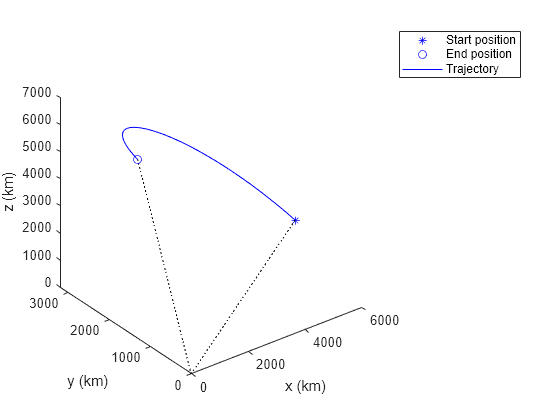
lookupPose 関数を使用して、ECEF フレーム内の軌跡の直交ウェイポイントを検索します。
sampleTimes = 0:1000:3600*10;
n = length(sampleTimes);
positionsCart = lookupPose(trajectory,sampleTimes,'ECEF');ECEF フレームで結果を可視化します。
figure() km = 1000; plot3(positionsCart(1,1)/km,positionsCart(1,2)/km,positionsCart(1,3)/km, 'b*'); hold on; plot3(positionsCart(end,1)/km,positionsCart(end,2)/km,positionsCart(end,3)/km, 'bo'); plot3(positionsCart(:,1)/km,positionsCart(:,2)/km,positionsCart(:,3)/km,'b'); plot3([0 positionsCart(1,1)]/km,[0 positionsCart(1,2)]/km,[0 positionsCart(1,3)]/km,'k:'); plot3([0 positionsCart(end,1)]/km,[0 positionsCart(end,2)]/km,[0 positionsCart(end,3)]/km,'k:'); xlabel('x (km)'); ylabel('y (km)'); zlabel('z (km)'); legend('Start position','End position', 'Trajectory')
入力引数
出力引数
拡張機能
バージョン履歴
R2024a で導入