このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
pointAt
衛星をターゲットに向ける
構文
説明
衛星オブジェクト
pointAt( はベクトル sat,coordinates)sat 内の衛星を coordinates で指定された地理座標 [緯度、経度、高度] に向けます。
pointAt( は、行ベクトル sat,'nadir')sat で指定された衛星を天底方向に向けます。'nadir' はデフォルトの指向方向です。
pointAt( は、衛星sat,attitudetable)sat の姿勢を、MATLAB® timetable オブジェクトである attitudetable で指定された姿勢に従うように設定します。
pointAt( は、以前の sat,attitudetable,Name=Value)attitudetable 構文の入力引数に加えて、1 つ以上の名前と値の引数を使用してオプションを指定します。たとえば、提供された姿勢値を地心天体基準座標系 (GCRF) からボディ座標系への回転として解釈するには、CoordinateFrame を inertial に設定します。
pointAt( は、衛星sat,attitudetimeseries)sat の姿勢を、MATLAB timeseries オブジェクトである attitudetimeseries で指定された姿勢に従うように設定します。
pointAt( は、以前の sat,attitudetimeseries,Name=Value)attitudetimeseries 構文の入力引数に加えて、1 つ以上の名前と値の引数を使用してオプションを指定します。たとえば、提供された姿勢値を GCRF からボディ座標系への回転として解釈するには、CoordinateFrame を inertial に設定します。
ジンバルオブジェクト
pointAt( は、ベクトル gimbal,'none')gimbal 内のジンバルのジンバル角度 (ジンバル方位角とジンバル仰角) をゼロに設定します。この設定はデフォルトです。
pointAt( は、gimbal,coordinates)coordinates で指定された地理座標 [緯度、経度、高度] に向かって、ベクトル gimbal 内のジンバルを操縦します。
pointAt( は、行ベクトル gimbal,'nadir')gimbal で指定されたジンバルを親の天底方向、つまり親の緯度、経度、および 0 メートル高度に向けます。
pointAt( は、ジンバルの向きを、MATLAB gimbal,steeringtable)timetable オブジェクトである steeringtable で指定された方位角仰角に合わせるように設定します。
pointAt( は、ジンバルの向きを、MATLAB gimbal,steeringtimeseries)timeseries オブジェクトである steeringtimeseries で指定された方位角仰角に合わせるように設定します。
例
衛星シナリオ オブジェクトを作成します。
startTime = datetime(2021,6,10); % 10 June 2021, 12:00 AM UTC stopTime = datetime(2021,6,11); % 11 June 2021, 12:00 AM UTC sampleTime = 60; % seconds sc = satelliteScenario(startTime,stopTime,sampleTime);
シナリオに衛星を追加します。
semiMajorAxis = 10000000; % meters eccentricity = 0; inclination = 10; % degrees rightAscensionOfAscendingNode = 0; % degrees argumentOfPeriapsis = 0; % degrees trueAnomaly = 0; % degrees sat = satellite(sc,semiMajorAxis,eccentricity, ... inclination,rightAscensionOfAscendingNode, ... argumentOfPeriapsis,trueAnomaly);
シナリオに地上局を追加します。
latitude = 42.3501; % degrees longitude = -71.3504; % degrees gs = groundStation(sc,latitude,longitude);
地上局にジンバルを追加します。
g = gimbal(gs,MountingLocation=[0; 0; -1],MountingAngles=[0; 180; 0]);
ジンバルにコニカル センサーを追加します。
c = conicalSensor(g,MountingLocation=[0; 0; 0.5]);
ジンバルを衛星に向けます。
pointAt(g,sat);
衛星シナリオ ビューアーを使用してシナリオを可視化します。
v = satelliteScenarioViewer(sc);
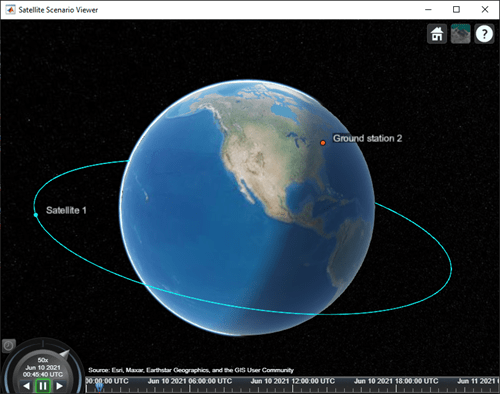
シナリオを再生します。
play(sc);
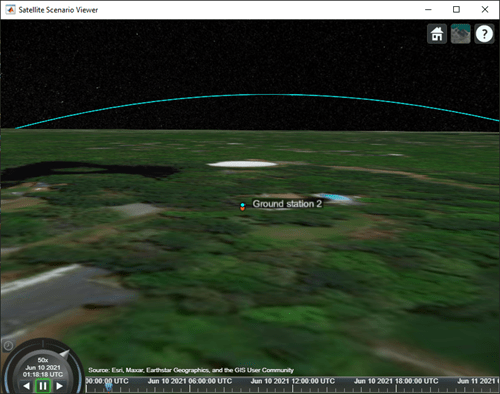
地上局をカメラのターゲットとして設定します。
camtarget(v,gs);
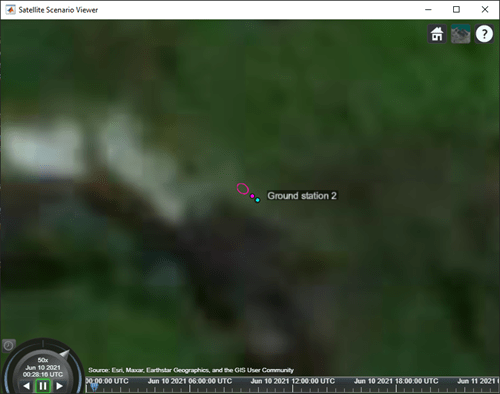
円錐形センサーの視野を可視化し、円錐形センサーの向きの変化を観察します。
fieldOfView(c);
入力引数
名前と値の引数
バージョン履歴
R2021a で導入