latency
Syntax
Description
delay = latency(source,target)source asset to
the target asset. The source and
target assets must belong to the same satelliteScenario object. If the value of
the AutoSimulate
property of the satelliteScenario object is
true, the latency function returns the propagation
delay history from the value of StartTime to
the value of StopTime.
Otherwise, it returns the propagation delay history from StartTime to
SimulationTime.
[___] = latency(
calculates latency at the specified datetime source,target,timeIn)timeIn. When using this
syntax, the latency function sets the second dimension of
delay and timeOut to
1.
Note
When the target asset is a Satellite
object, the latency function uses a numerical iterative solution to
compute the propagation delay. When the target asset is a GroundStation
object, the latency function applies Sagnac correction to compute
the propagation delay.
Examples
Input Arguments
Output Arguments
More About
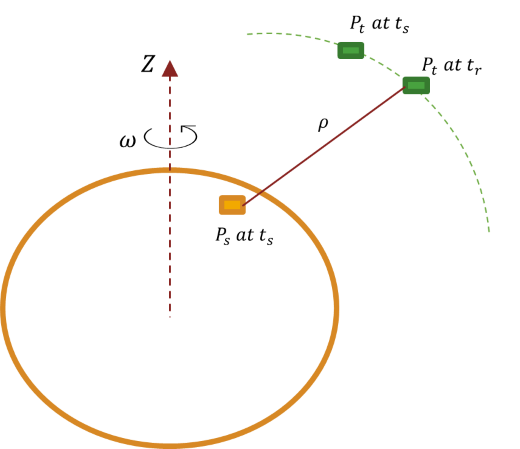
Consider a satellite scenario in which a satellite is the source and a ground station on Earth is the target. Because the satellite scenario currently supports only static ground stations, assume that the velocity of the ground station is the same as the angular velocity of Earth.
Given the instant at which the source transmits the signal and the instant at which the target receives the signal , the latency or propagation delay is the difference . Assume that at every instant, the source transmits the signal. The unknown is the instant at which the signal reaches the target.

Consider that the positions of the source and the target are in International Terrestrial Reference Frame (ITRF).
Source position Ps at ts—
Target position Pt at tr —
The distance between the target position Pt and the source position Ps in the tr time frame is the distance travelled by the signal , where
To obtain the source position in the tr time frame, apply this rotation matrix to the source position.
In this equation, the time difference equals the time taken by the signal to cover the distance .
Substitute this value in the rotation matrix to obtain
The position of source in the time frame tr is
In this equation,
is to the order of
1e-5.is to the order of
1e7.c is to the order of
1e-8.is to the order of
1e-5.
As is very small, apply small angle approximation ( and ) to obtain
Substitute this value in to obtain
Square both sides of this equation to obtain
Rearrange the terms and simplify the equation to obtain
The true geometric range for the position of source and target in the tr time frame is
Let and . Substitute these values in to obtain
The discriminant of this quadratic equation is
If , then you can express as
When the target is a satellite, you must consider the movement of a satellite to know when the satellite receives the signal.
Let f be the function that defines the orbital motion of the satellite, which is nonlinear with no sharp peaks. Also, let PS be the position of the source in Geocentric Celestial Reference Frame (GCRF). The time taken by the signal to reach the target equals the time the target takes to move from its position at the transmission time to its position at the reception time.
You can find the solution for the objective function iteratively by using the Newton-Raphson method.
, where tS is the source transmit time.
Assuming the satellite does not move, the initial guess to the function is the time the signal takes to reach the satellite.
The root of the objective function is latency. Obtaining the exact root is not always
possible because of the numerical precision errors. Therefore, consider the value for which
the objective function returns a value less than 2.2204e-16 as the root.
This methodology is applicable for any moving target, regardless of source movement.
Version History
Introduced in R2023a