Bag ファイルのログ記録および解析
ROS のトピックのメッセージ データは ROS bag ファイル ("rosbag") と呼ばれるログ ファイルに保存されます。MATLAB® 関数、アプリ、および Simulink® ブロックを使用して、これらの rosbag ファイル内の ROS データに対してアクセス、フィルター処理、オフライン解析の実行を行うことができます。これらの bag は多くの場合、1 つ以上の ROS トピックにサブスクライブし、受け取ったメッセージ データを効率的なファイル構造で保存することにより作成されます。rosbag の処理例は、Work with rosbag Logfilesを参照してください。
ROS ツールボックスでは、ROS 2 bag ファイル ("ros2bags") 内のメッセージ データにアクセスすることもできます。これらの ros2bag ファイルで ROS 2 データをフィルター処理し、オフライン解析を実行できます。
メモ
2025 年 5 月 31 日をもって、ROS 1 はサポートが終了し、公式にはサポートされなくなりました。最新の機能およびアップデートにアクセスするために、ROS 2 Bag ファイルのログ記録および解析に記載されている同等の ROS 2 機能への移行が推奨されます。
カテゴリ
- ROS 2 Bag ファイルのログ記録および解析
ROS 2 bag ファイルをインポート、可視化、および解析する
- ROS Bag ファイルのログ記録および解析
ROS bag ファイルをインポート、可視化、および解析する
注目の例
Sign-Following Robot with ROS 2 in MATLAB
Control a simulated robot running on a separate ROS-based simulator over ROS 2 network in MATLAB and generate a ROS 2 node for the control algorithm to deploy it to a remote device.
Sign-Following Robot with ROS 2 in Simulink
Use Simulink to control a simulated robot running on a separate ROS-based simulator over ROS 2 network.

Use ROS 2 Logger App to Save ROS 2 Messages from Simulink
Use ROS 2 Logger app to record ROS 2 messages during Simulink simulation.

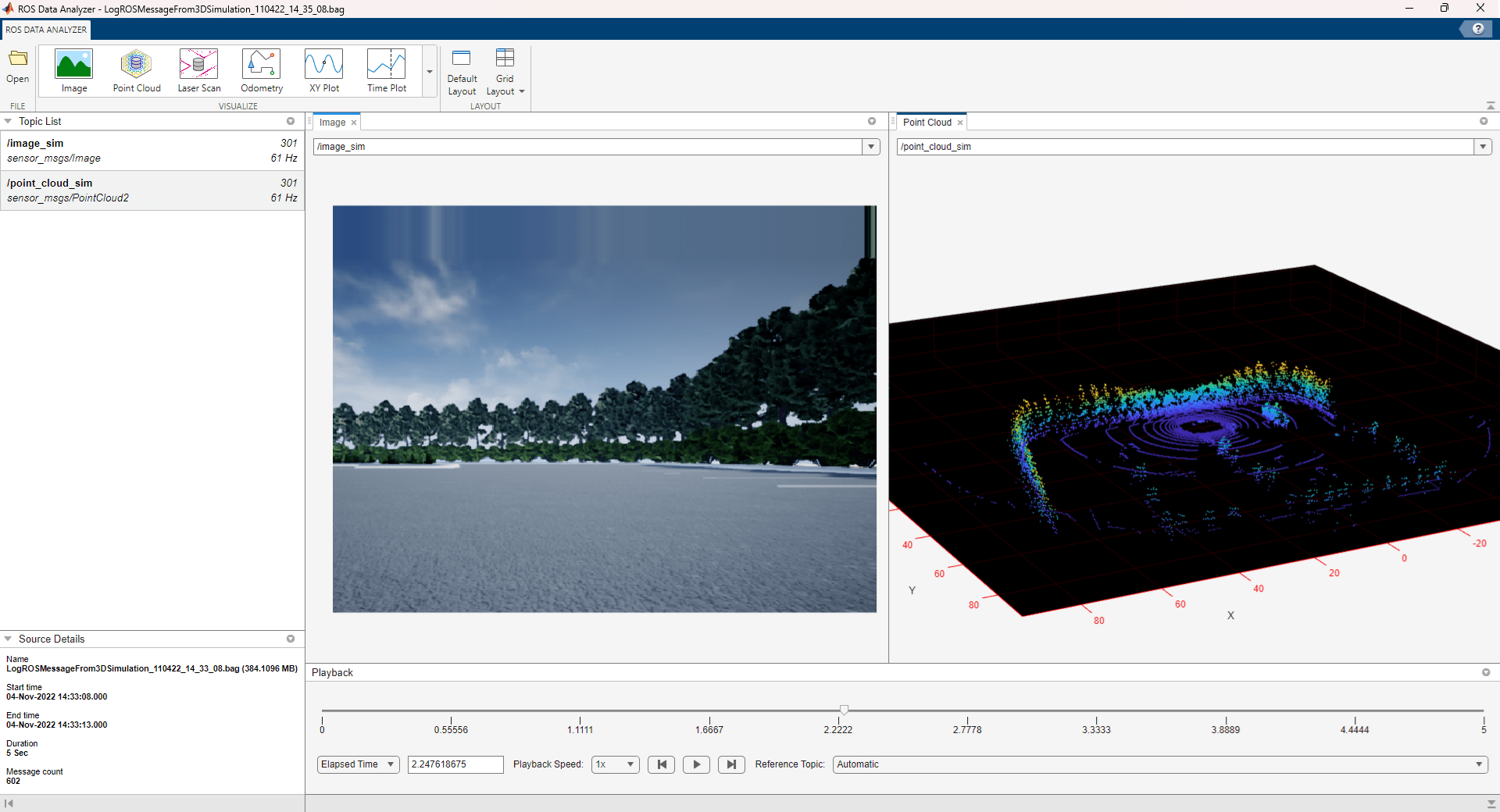
Simulink での ROS 2 bag ログファイルのデータの再生
Read Data ブロックを使用して ROS 2 bag ファイルのデータを再生する。

Read and Visualize ROS 2 bags in AWS S3 Cloud
Read and visualize ROS 2 bags stored in AWS® S3 cloud using ROS Toolbox and a customized MATLAB reference architecture.

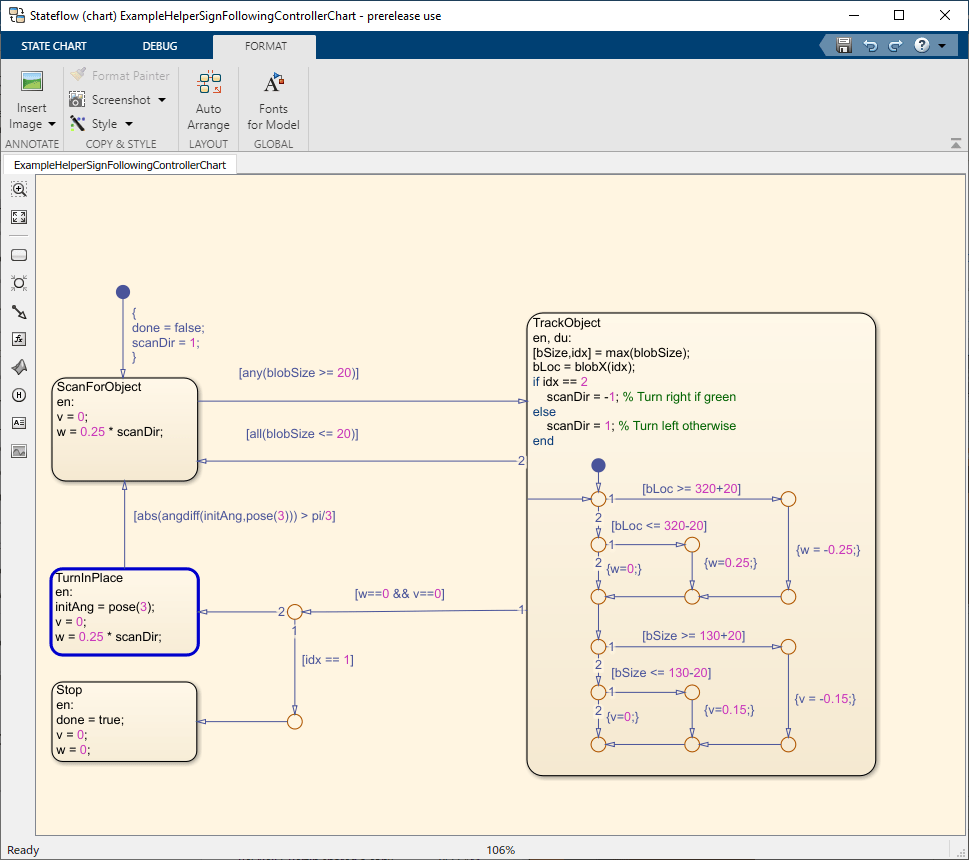
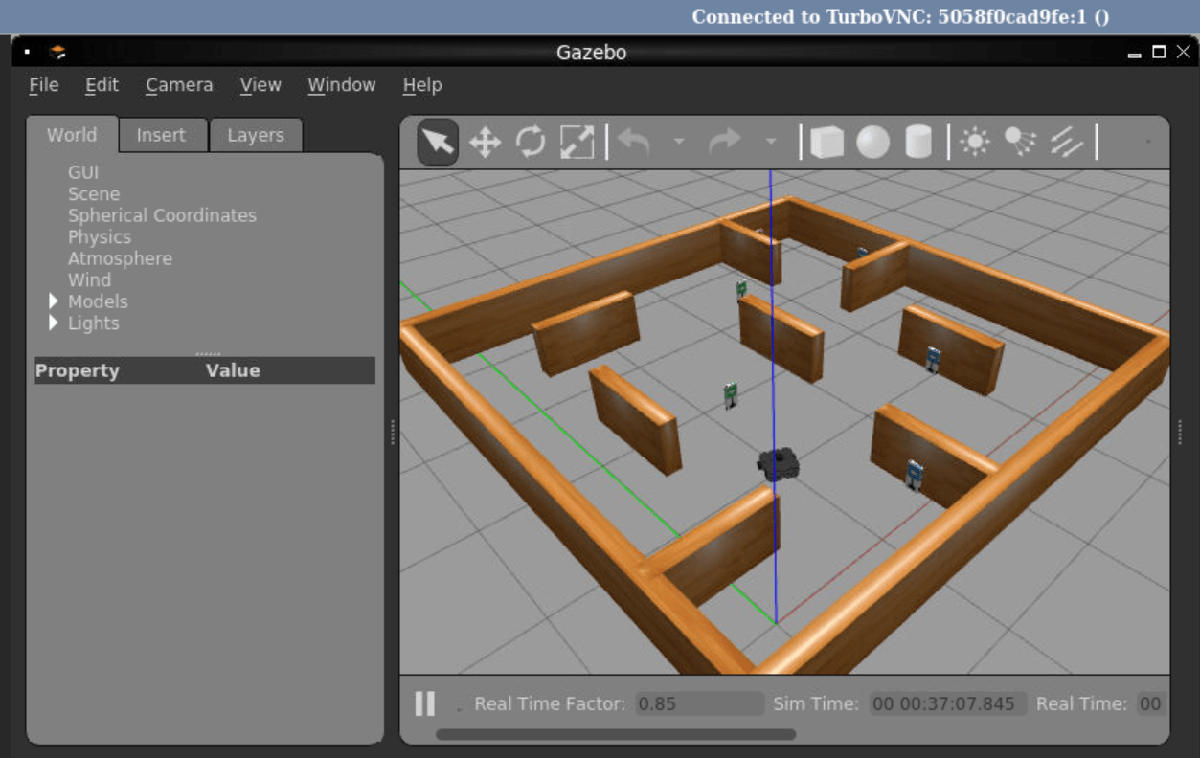
Sign Following Robot with ROS in MATLAB
Control a simulated robot running on a separate ROS-based simulator over a ROS network using MATLAB.
Sign-Following Robot with ROS in Simulink
Use Simulink to control a simulated robot running on a separate ROS-based simulator.
Use ROS Logger App to Save ROS Messages from Simulink
Use ROS Logger app to record ROS messages during Simulink simulation.

Simulink での Jackal rosbag ログファイルのデータの再生
ClearPath™ Robotics の Jackal™ ロボットから記録された rosbag ログ ファイルのデータを Read Data ブロックを使用して再生する。
Generate Traversability Map for Offroad Terrain Using Semantic Segmentation
Create real-time traversability map for offroad terrain by fusing semantic segmentation from camera images with lidar point clouds.