Simulink での Jackal rosbag ログファイルのデータの再生
ClearPath™ Robotics の Jackal™ ロボットから記録された rosbag ログファイルのデータを Read Data ブロックを使用して再生します。
モデルを読み込みます。

open_system('read_jackal_pose_log.slx')Read Data ブロック マスクを開いて rosbag ログファイルを読み込みます。[ログファイル データの読み込み] リンクをクリックします。ログファイルを参照し、時間オフセットまたは制限された持続時間を必要に応じて指定します。この例には jackal_sim.bag ファイルが添付されています。
nav_msgs/Odometry メッセージが含まれている目的のトピック /odometry/filtered を選択します。Read Data ブロックで rosbag ログファイルからメッセージが出力されます。Bus Selector で nav_msgs/Odometry メッセージから xy 位置が抽出されます。
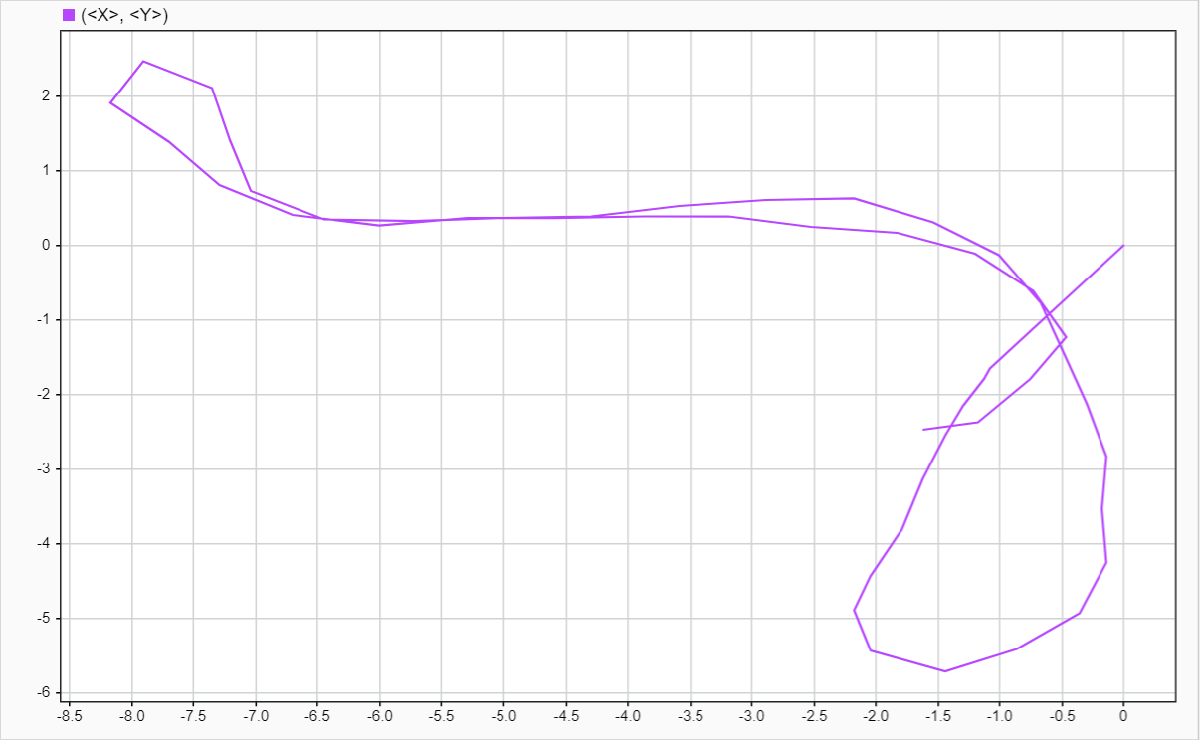
モデルを実行します。シミュレーション時間と同期して、ブロックでデータが再生されます。"Record" のプロットに時間の経過に伴うロボットの位置が表示されます。
sim(gcs)