Simulink における逆運動学を用いたエンドエフェクタの軌跡のトレース
Simulink® を使用して、剛体ロボット モデルを使った逆運動学の計算を行います。ロボットのエンドエフェクタの軌跡を定義し、点をループして、この軌跡をトレースするロボット コンフィギュレーションを求めます。
URDF (Unified Robot Description Format) ファイルから、RigidBodyTree オブジェクトとしてロボット モデルをインポートします。
robot = importrobot('iiwa14.urdf'); robot.DataFormat = 'column';
ロボットを表示します。
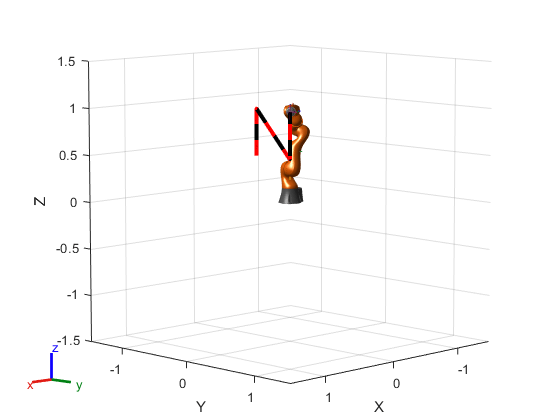
ax = show(robot);

ロボットの軌跡を指定します。これらの "xyz" 座標は、ロボットの前に N 字型の形状を描画します。
x = 0.5*zeros(1,4)+0.25; y = 0.25*[-1 -1 1 1]; z = 0.25*[-1 1 -1 1] + 0.75; hold on plot3(x,y,z,'--r','LineWidth',2,'Parent',ax) hold off

逆運動学を実行するモデルを開きます。MATLAB® で定義されている "xyz" 座標は同次変換に変換され、望ましい Pose として入力されます。出力される逆運動学の解は、次の解の初期推定としてフィードバックされます。この初期推定は、エンドエフェクタの姿勢を追跡し滑らかなコンフィギュレーションを生成するのに役立ちます。
コールバック ボタンを押すと、定義したばかりのロボット モデルと軌跡を再生成できます。
close
open_system('sm_ik_trajectory_model.slx')

シミュレーションを実行します。モデルは、エンドエフェクタの指定された軌跡を追従するロボット コンフィギュレーション (configs) を生成します。
sim('sm_ik_trajectory_model.slx')
ロボット コンフィギュレーションをループして、タイム ステップごとにロボットを表示します。エンドエフェクタの位置を xyz に保存します。
figure('Visible','on'); tformIndex = 1; for i = 1:10:numel(configs.Data)/7 currConfig = configs.Data(:,1,i); show(robot,currConfig); drawnow xyz(tformIndex,:) = tform2trvec(getTransform(robot,currConfig,'iiwa_link_ee')); tformIndex = tformIndex + 1; end

エンドエフェクタの最終的な軌跡を黒のラインで描画します。図では、当初定義された N 字型の形状 (赤の点線) をエンドエフェクタがトレースしていることが示されています。
figure('Visible','on') show(robot,configs.Data(:,1,end)); hold on plot3(xyz(:,1),xyz(:,2),xyz(:,3),'-k','LineWidth',3); plot3(x,y,z,'--r','LineWidth',3) hold off