generalizedInverseKinematics
複数拘束をもつ逆運動学ソルバーの作成
説明
generalizedInverseKinematics System object™ は、指定された rigidBodyTree オブジェクトに対して、非線形の運動学的拘束の集合を満たすジョイント コンフィギュレーションを求めるか、ソルバーがすべての拘束を満たすことができない場合には最も近い実行可能解を返します。
オブジェクトを呼び出す前に、拘束タイプ ConstraintInputs を指定します。オブジェクトを呼び出した後、拘束入力を変更するには、release( を呼び出します。gik)
拘束入力を拘束オブジェクトとして指定し、そこに渡される以下のオブジェクトを使用して generalizedInverseKinematics を呼び出します。拘束オブジェクトを作成するには、以下のオブジェクトを使用します。
唯一の拘束がエンドエフェクタの位置と方向である場合は、代わりに inverseKinematics をソルバーとして使用することを検討します。
閉形式逆運動学の解析解の詳細については、analyticalInverseKinematics を参照してください。
汎用逆運動学の拘束を解くには、次の手順に従います。
generalizedInverseKinematicsオブジェクトを作成して、そのプロパティを設定します。関数と同様に、引数を指定してオブジェクトを呼び出します。
System object の機能の詳細については、System object とはを参照してください。
作成
説明
gik = generalizedInverseKinematicsrigidBodyTree モデルと ConstraintInputs プロパティを指定します。
gik = generalizedInverseKinematics(PropertyName=Value)generalizedInverseKinematics(RigidBodyTree=rigidbodytree,ConstraintInputs=inputTypes) は剛体ツリー モデルおよび想定される拘束入力が指定された汎用逆運動学ソルバーを作成します。
プロパティ
使用法
説明
[ は初期推定および拘束の説明オブジェクトのコンマ区切りリストに基づいて、ジョイント コンフィギュレーション configSol,solInfo] = gik(initialguess,constraintObj,...,constraintObjN)configSol を検出します。拘束の説明の数は ConstraintInputs プロパティによって決まります。
入力引数
出力引数
オブジェクト関数
オブジェクト関数を使用するには、System object を最初の入力引数として指定します。たとえば、obj という名前の System object のシステム リソースを解放するには、以下の構文を使用します。
release(obj)
例
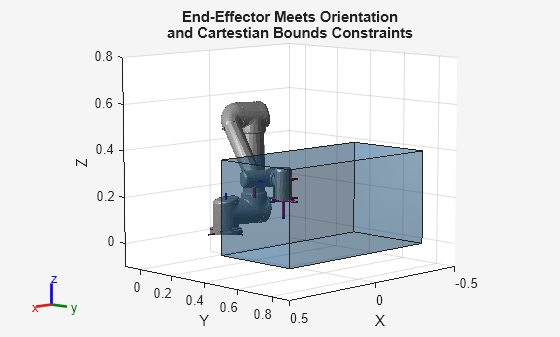
汎用逆運動学 (GIK) で fmincon SQP ソルバー アルゴリズムを使用して、エンドエフェクタが特定の境界内で下向きになるコンフィギュレーションを求めます。
ロボット モデルを読み込み、GIK ソルバーを作成します。ソルバーのアルゴリズムを fmincon SQP に設定します。
robot = loadrobot("universalUR5",DataFormat="row"); gik = generalizedInverseKinematics( ... RigidBodyTree=robot, ... SolverAlgorithm="fminconsqp", ... ConstraintInputs={"orientation","cartesian"});
方向ターゲットの拘束と直交座標の範囲の拘束を定義します。
ee = robot.BodyNames{end};
oriTgt = constraintOrientationTarget(ee);
oriTgt.TargetOrientation = eul2quat([0 pi 0],"ZYX");
cartBnds = constraintCartesianBounds(ee);
cartBnds.Bounds = [-0.4 0.4; 0.4 0.8; 0.0 0.4];初期推定コンフィギュレーションを設定し、方向ターゲットと直交座標の範囲の両方の拘束を満たすコンフィギュレーションを求めます。
initGuessConfig = [pi/2 -pi/3 0 0 0 0]; [config,solutionInfo] = gik(initGuessConfig,oriTgt,cartBnds);
ソルバーによって返されるコンフィギュレーションを可視化し、exampleHelperShowCartesianBounds 補助関数を使用して直交座標の範囲を透明なパッチとして可視化します。
show(robot,config); title(["End-Effector Meets Orientation","and Cartestian Bounds Constraints"]); axis([-0.5 0.5 -0.1 0.9 -0.1 0.8]) exampleHelperShowCartesianBounds(cartBnds.Bounds,0.3) hold off
指定した位置でロボット アームを保持し、ロボット ベースに向かう汎用逆運動学ソルバーを作成します。必要な拘束パラメーターをソルバーに渡す拘束オブジェクトを作成します。
Robotics System Toolbox™ loadrobotから KUKA iiwa 14 ロボット モデルを読み込みます。rigidBodyTree オブジェクトとして返されます。
manipulator = loadrobot("kukaIiwa14");汎用逆運動学を解くための System object™ を作成します。
gik = generalizedInverseKinematics;
KUKA LBR ロボットを使用するように System object を設定します。
gik.RigidBodyTree = manipulator;
拘束入力として constraintAiming オブジェクトおよび constraintPositionTarget オブジェクトを必要とするようにソルバーに指定します。
gik.ConstraintInputs = {"position","aiming"};2 つの拘束オブジェクトを作成します。
iiwa_link_ee_kukaという名前のボディの原点はロボットの base 座標系を基準とする[0.0 0.5 0.5]に配置されます。iiwa_link_ee_kukaという名前のボディの "z" 軸はロボットの base 座標系の原点に向かいます。
posTgt = constraintPositionTarget("iiwa_link_ee_kuka"); posTgt.TargetPosition = [0.0 0.5 0.5]; aimCon = constraintAiming("iiwa_link_ee_kuka"); aimCon.TargetPoint = [0.0 0.0 0.0];
拘束を満たすコンフィギュレーションを求めます。ConstraintInputs プロパティで指定された順序で、拘束オブジェクトを System object に渡す必要があります。ロボット コンフィギュレーションで初期推定を指定します。
q0 = homeConfiguration(manipulator); % Initial guess for solver
[q,solutionInfo] = gik(q0,posTgt,aimCon);ソルバーによって返されるコンフィギュレーションを可視化します。
show(manipulator,q);
title(sprintf("Solver status: %s", solutionInfo.Status))
axis([-0.75 0.75 -0.75 0.75 -0.5 1])
ターゲット位置からベースの原点までのライン セグメントをプロットします。tool0 座標系の原点はセグメントの一方の端と一致し、その z 軸はセグメントと揃えられます。
hold on plot3([0.0 0.0],[0.5 0.0],[0.5 0.0],"--o") hold off

拡張機能
バージョン履歴
R2017a で導入参考
オブジェクト
analyticalInverseKinematics|inverseKinematics|constraintPoseTarget|constraintPositionTarget|constraintAiming|constraintCartesianBounds|constraintJointBounds|constraintOrientationTarget|constraintDistanceBounds|constraintFixedJoint|constraintPrismaticJoint|constraintRevoluteJoint