このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
Inverse Kinematics
エンドエフェクタの姿勢を実現するジョイント コンフィギュレーションの計算
ライブラリ:
Robotics System Toolbox /
Manipulator Algorithms
説明
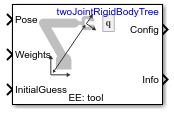
Inverse Kinematics ブロックは、逆運動学 (IK) ソルバーを使用して、指定された剛体ツリー モデルに基づいて目的のエンドエフェクタ姿勢のジョイント コンフィギュレーションを計算します。rigidBodyTree クラスを使用して、ロボットの剛体ツリー モデルを作成します。剛体ツリー モデルはソルバーが強制するすべてのジョイント拘束を定義します。
RigidBodyTree パラメーターとブロック マスク内の目的のエンドエフェクタを指定します。[ソルバー パラメーター] タブでアルゴリズム パラメーターを調整することもできます。
目的のエンドエフェクタの [姿勢]、姿勢の許容誤差の [重み]、ジョイント コンフィギュレーションの [InitialGuess] を入力します。ソルバーは、[ソルバー パラメーター] タブで指定した許容誤差内のエンドエフェクタの姿勢を満たすロボット コンフィギュレーション [Config] を出力します。
例
Simulink における逆運動学を用いたエンドエフェクタの軌跡のトレース
Simulink® で剛体ロボット モデルを使用して逆運動学の計算を行い、定義されたエンドエフェクタの軌跡をトレースする。
端子
入力
出力
パラメーター
参照
[1] Badreddine, Hassan, Stefan Vandewalle, and Johan Meyers. "Sequential Quadratic Programming (SQP) for Optimal Control in Direct Numerical Simulation of Turbulent Flow." Journal of Computational Physics. 256 (2014): 1–16. doi:10.1016/j.jcp.2013.08.044.
[2] Bertsekas, Dimitri P. Nonlinear Programming. Belmont, MA: Athena Scientific, 1999.
[3] Goldfarb, Donald. "Extension of Davidon’s Variable Metric Method to Maximization Under Linear Inequality and Equality Constraints." SIAM Journal on Applied Mathematics. Vol. 17, No. 4 (1969): 739–64. doi:10.1137/0117067.
[4] Nocedal, Jorge, and Stephen Wright. Numerical Optimization. New York, NY: Springer, 2006.
[5] Sugihara, Tomomichi. "Solvability-Unconcerned Inverse Kinematics by the Levenberg–Marquardt Method." IEEE Transactions on Robotics. Vol. 27, No. 5 (2011): 984–91. doi:10.1109/tro.2011.2148230.
[6] Zhao, Jianmin, and Norman I. Badler. "Inverse Kinematics Positioning Using Nonlinear Programming for Highly Articulated Figures." ACM Transactions on Graphics. Vol. 13, No. 4 (1994): 313–36. doi:10.1145/195826.195827.