referencePathFrenet
滑らかな参照パスのウェイポイントへの当てはめ
説明
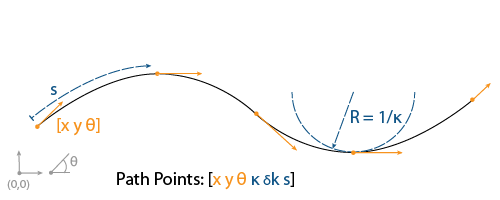
referencePathFrenet オブジェクトは、連続した滑らかな区分的曲線を [x y] または [x y theta] として与えられる一連のウェイポイントに当てはめます。当てはめた後の曲線に沿ったパス上の点は [x y theta kappa dkappa s] として表されます。ここで、次のようになります。
x y および theta — グローバル座標で表された SE(2) の状態 (x と y はメートル単位、theta はラジアン単位)
kappa — 曲率 (半径の逆数、
m-1単位)dkappa — 弧の長さに対する曲率の微分 (
m-2単位)s — 弧の長さ (パスの原点からパスに沿った距離、メートル単位)
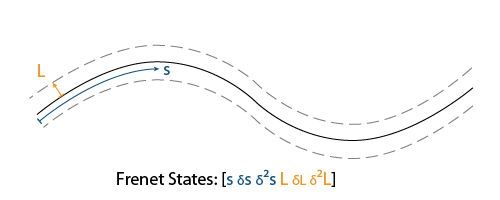
このオブジェクトを使用して、グローバル座標系とフレネ座標系の間で軌跡を変換し、弧の長さに基づいて状態をパスに沿って内挿し、グローバル状態からパス上の最近傍点をクエリします。
オブジェクトはフレネ状態を [S dS ddS L dL ddL] の形式のベクトルとして表します。ここで、S は弧の長さ、L は参照パスの方向からの垂直な偏差です。S の微分は時間を基準とします。L の微分は弧の長さ S を基準とします。
作成
説明
refPathObj = referencePathFrenet( は、一連の連続した区分的曲線を指定されたウェイポイントに当てはめます。引数 waypoints)waypoints で Waypoints プロパティを設定します。
refPathObj = referencePathFrenet(___, は、前述の構文の入力引数に加え、1 つ以上の名前と値のペアの引数を使用してプロパティを設定します。DiscretizationDistance および MaxNumWaypoints の各プロパティを名前と値の引数として指定できます。Name,Value)
プロパティ
オブジェクト関数
closestPoint | 参照パス上のグローバル点への最近傍点の検索 |
closestPointsToSequence | Projects sequence of points onto path |
closestProjections | Find orthogonal projections between path tangent vector and query point |
curvature | 弧の長さに対する曲率を返す |
changeInCurvature | 弧の長さに対する曲率変化を返す |
frenet2global | Convert Frenet states to global states |
global2frenet | Convert global states to Frenet states |
interpolate | 参照パス上の指定された弧の長さを内挿 |
position | 弧の長さに対する xy 位置を返す |
tangentAngle | 弧の長さに対する正接角度を返す |
show | Display reference path in figure |
copy | Copy reference path |
例
フレネ座標を使用して参照パスの別の軌跡を生成します。軌跡に対して異なる初期状態と終了状態を指定します。生成された軌跡に基づいて状態を調整します。
一連のウェイポイントから参照パスを生成します。この参照パスから trajectoryGeneratorFrenet オブジェクトを作成します。
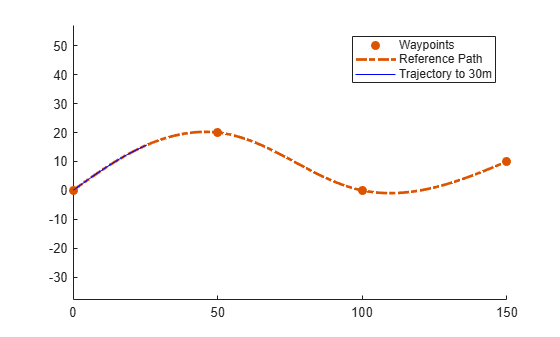
waypoints = [0 0; ... 50 20; ... 100 0; ... 150 10]; refPath = referencePathFrenet(waypoints); connector = trajectoryGeneratorFrenet(refPath);
パスの原点と、パスに沿って 30 m のポイントとの間の 5 秒の軌跡を、フレネ状態として生成します。
initState = [0 0 0 0 0 0]; % [S ds ddS L dL ddL] termState = [30 0 0 0 0 0]; % [S ds ddS L dL ddL] [~,trajGlobal] = connect(connector,initState,termState,5);
軌跡をグローバル座標で表示します。
show(refPath); hold on axis equal plot(trajGlobal.Trajectory(:,1),trajGlobal.Trajectory(:,2),'b') legend(["Waypoints","Reference Path","Trajectory to 30m"])
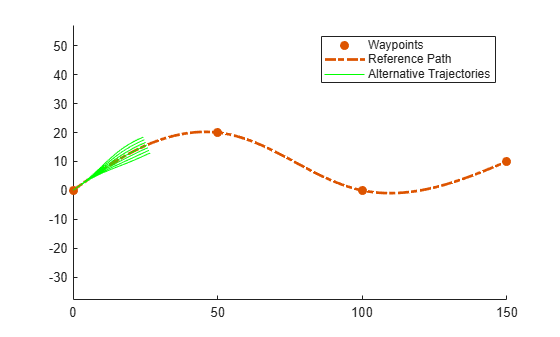
横方向の偏差を –3 m から 3 m までにして終了状態の行列を作成します。同じ弧の長さを 10 秒で進むが参照パスから横方向に逸脱する軌跡を生成します。新しい代替パスを表示します。
termStateDeviated = termState + ([-3:3]' * [0 0 0 1 0 0]); [~,trajGlobal] = connect(connector,initState,termStateDeviated,10); clf show(refPath); hold on axis equal for i = 1:length(trajGlobal) plot(trajGlobal(i).Trajectory(:,1),trajGlobal(i).Trajectory(:,2),'g') end legend(["Waypoints","Reference Path","Alternative Trajectories"]) hold off
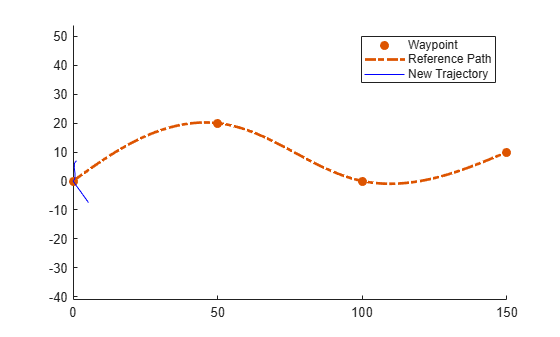
新しい終了状態を指定して新しい軌跡を生成します。この軌跡は、縦方向の 10 m/s の速度を得るために後退運動を必要とするため望ましくありません。
newTermState = [5 10 0 5 0 0]; [~,newTrajGlobal] = connect(connector,initState,newTermState,3); clf show(refPath); hold on axis equal plot(newTrajGlobal.Trajectory(:,1),newTrajGlobal.Trajectory(:,2),'b'); legend(["Waypoint","Reference Path","New Trajectory"]) hold off
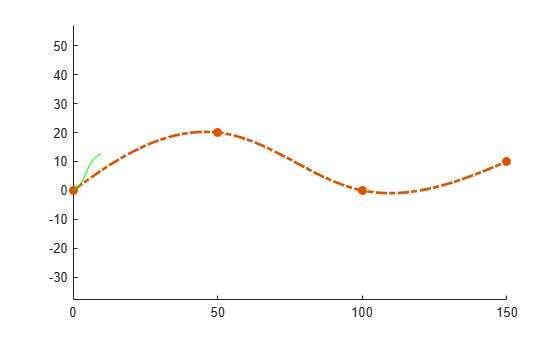
弧の長さとして NaN を指定して、縦方向の状態の制限を緩和します。軌跡を再度生成して表示します。参照パスから逸脱した適切な別の軌跡が新しい位置に表示されます。
relaxedTermState = [NaN 10 0 5 0 0]; [~,trajGlobalRelaxed] = connect(connector,initState,relaxedTermState,3); clf show(refPath); hold on axis equal plot(trajGlobalRelaxed.Trajectory(:,1),trajGlobalRelaxed.Trajectory(:,2),'g'); hold off
詳細
参照
[1] Werling, Moritz, Julius Ziegler, Sören Kammel, and Sebastian Thrun. "Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame." 2010 IEEE International Conference on Robotics and Automation. 2010, pp. 987–993.
[2] Bertolazzi, Enrico, and Marco Frego. “Fast and Accurate Clothoid Fitting.” Mathematical Methods in the Applied Sciences 38, no. 5 (March 30, 2015): 881–97. https://doi.org/10.1002/mma.3114.
拡張機能
バージョン履歴
R2020b で導入