closestPoint
参照パス上のグローバル点への最近傍点の検索
構文
説明
pathPoints = closestPoint(refPath,points)points への参照パス上の最近傍点を検索します。
[ は、pathPoints,inWindow] = closestPoint(refPath,points)points 内の対応する xy 座標の各点が検索ウィンドウ内に投影されているかどうかを示す logical ベクトル inWindow をオプションで返します。
[_] = closestPoint( は、最近傍点の検索に使用するパスの区間を定義する非減少行ベクトル refPath,points,searchWindow)searchWindow をオプションで受け入れます。
例
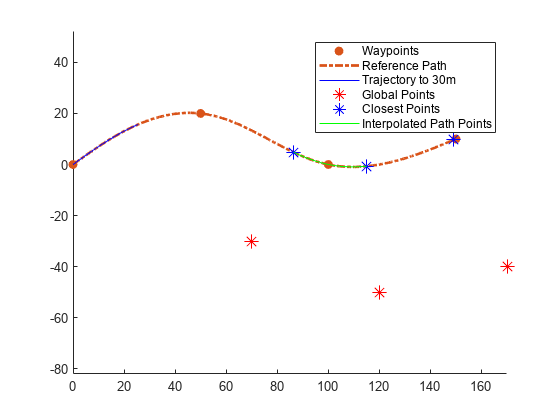
一連のウェイポイントから参照パスを生成します。
waypoints = [0 0; 50 20; 100 0; 150 10]; refPath = referencePathFrenet(waypoints);
この参照パスから trajectoryGeneratorFrenet オブジェクトを作成します。
connector = trajectoryGeneratorFrenet(refPath);
パスの原点と、パスに沿って 30 メートルのポイントとの間の 5 秒の軌跡を、フレネ状態として生成します。
initCartState = refPath.SegmentParameters(1,:); initFrenetState = global2frenet(refPath,initCartState); termFrenetState = initFrenetState + [30 zeros(1,5)]; frenetTraj = connect(connector,initFrenetState,termFrenetState,5);
この軌跡をグローバル状態に変換します。
globalTraj = frenet2global(refPath,frenetTraj.Trajectory);
この参照パスと軌跡を表示します。
show(refPath); axis equal hold on plot(globalTraj(:,1),globalTraj(:,2),'b')
グローバル点を指定し、参照パス上の最近傍点を求めます。
globalPoints = waypoints(2:end,:) + [20 -50]; nearestPathPoint = closestPoint(refPath,globalPoints);
グローバル点と、参照パス上の最近傍点を表示します。
plot(globalPoints(:,1),globalPoints(:,2),'r*','MarkerSize',10) plot(nearestPathPoint(:,1),nearestPathPoint(:,2),'b*','MarkerSize',10)
参照パスに沿った最初の 2 つの最近傍点の間の弧の長さを内挿します。
arclengths = linspace(nearestPathPoint(1,6),nearestPathPoint(2,6),10); pathStates = interpolate(refPath,arclengths);
内挿されたパス上の点を表示します。
plot(pathStates(:,1),pathStates(:,2),'g') legend(["Waypoints","Reference Path","Trajectory to 30m",... "Global Points","Closest Points","Interpolated Path Points"])
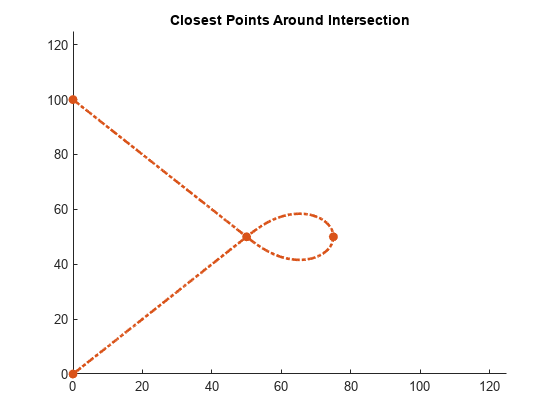
自己交差する参照パスを作成します。
refPath = referencePathFrenet([0 100 -pi/4; ... 50 50 -pi/4;... 75 50 pi/2; ... 50 50 -3*pi/4; ... 0 0 -3*pi/4]);
参照パスを表示します。
figure show(refPath); title("Closest Points Around Intersection") xlim([0 125]) ylim([0 125]) hold on
交差が発生する弧の長さを求めます。
sIntersection = refPath.SegmentParameters(2,end);
交差の直前と直後にあるフレネ状態を生成します。
f0 = [sIntersection-20 5 0 10 0 0]; % [S dS ddS L Lp Lpp] f1 = [sIntersection+20 5 0 -5 0 0]; % [S dS ddS L Lp Lpp]
一定の縦方向速度で移動する時間を計算します。
T = (f1(1)-f0(1))/f1(2);
この参照パスを使用して軌跡ジェネレーターを作成します。
generator = trajectoryGeneratorFrenet(refPath);
点間の軌跡を生成します。
[fTraj,gTraj] = connect(generator,f0,f1,T); pts = gTraj.Trajectory;
プロット補助関数を定義します。
mergeFcn = @(v1,v2)reshape([v1 v2 nan(size(v1,1),size(v2,2))]',[],1);
plotFcn = @(L1,L2,linespec)plot(mergeFcn(L1(:,1),L2(:,1:min(1,size(L2,2)))),mergeFcn(L1(:,2),L2(:,2:min(2,size(L2,2)))),linespec{:});
plotInterval = @(bounds,nPt,linespec)plotFcn(interpolate(refPath,linspace(bounds(1),bounds(2),nPt)'),[],linespec);軌跡をプロットします。
plotFcn(pts,[],{"k.-"});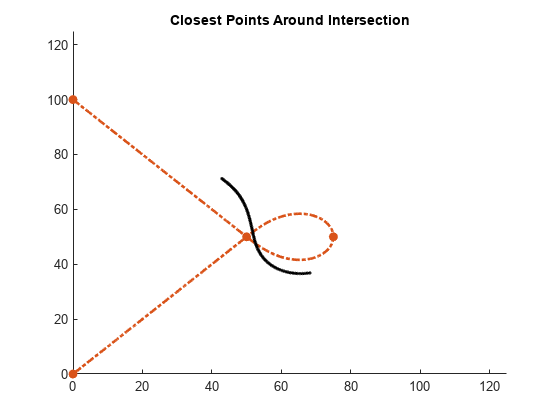
各グローバル状態へのパス上の最近傍点を計算します。
closestPts = closestPoint(refPath,pts);
最近傍点ベクトルをプロットします。
plotFcn(pts,closestPts,{"b"});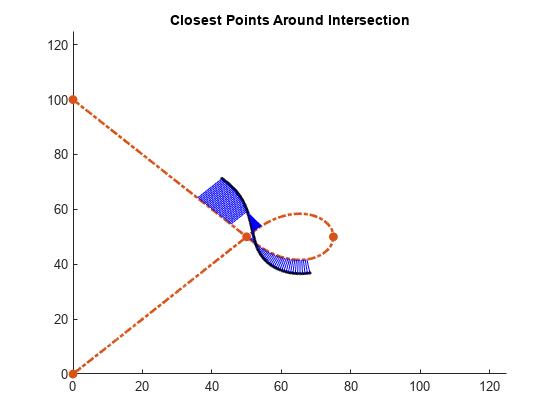
最近傍点を検索するウィンドウを定義します。
buffWindow = [f0(1)-5 f1(1)+5];
plotInterval(buffWindow,100,{"Color",[.5 .5 .5],"LineWidth",5});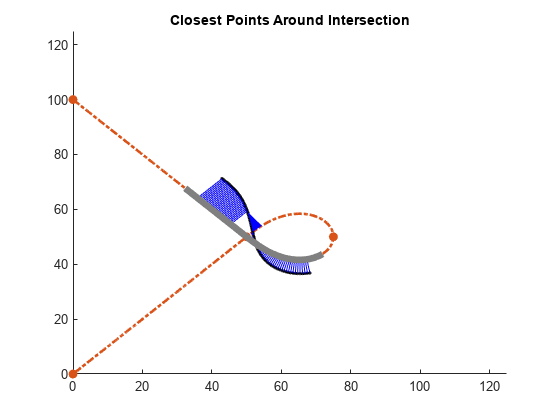
ウィンドウ内の最近傍点を求めます。
closestPtsInWindow = closestPoint(refPath,pts,buffWindow);
ウィンドウを適用した結果を表示します。
plotFcn(pts,closestPtsInWindow,{"g","LineWidth",3});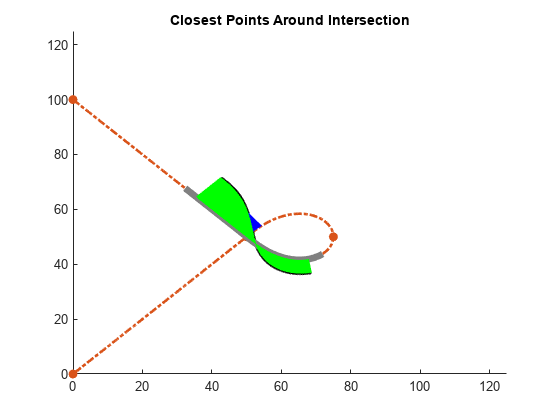
小さすぎるウィンドウを使用して最近傍点を求めます。
smallWindow = [f0(1)+5 f1(1)-5]; [closestPtsSmall,inWindow] = closestPoint(refPath,pts,smallWindow);
小さいウィンドウの結果を重ね合わせます。
plotInterval(smallWindow,100,{"m","LineWidth",3});
plotFcn(pts(inWindow,:),closestPtsSmall(inWindow,:),{"Color",[.5 1 .5]});
plotFcn(pts(~inWindow,:),closestPtsSmall(~inWindow,:),{"r"});
legend({"Waypoints","ReferencePath","Trajectory","ClosestPoints",...
"BuffWindow","ClosestInsideBuffWindow","SmallWindow",...
"ClosestInsideSmallWindow","ClosestOutsideSmallWindow"});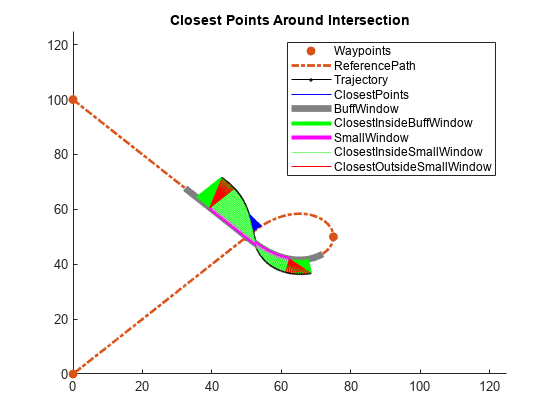
入力引数
出力引数
拡張機能
バージョン履歴
R2020b で導入