このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
volshow
ボリュームの表示
構文
説明
数値配列
vol = volshow(V)V を表示する Volume オブジェクトを作成します。マウスを使用して、表示を対話形式で回転および拡大縮小することもできます。Volume オブジェクトを作成した後は、vol を使用して、このオブジェクトのプロパティをクエリおよび変更します。プロパティの一覧については、Volume Properties を参照してください。
vol = volshow(V,Name=Value)volshow(V,RenderingStyle="Isosurface") は、3-D ボリューム V を表示して、レンダリング スタイルを "Isosurface" に設定します。
ブロック化されたイメージ ボリューム
R2023a 以降
bVol = volshow(bim)bim を表示する BlockedVolume オブジェクトを作成します。マウスを使用して、表示を対話形式で回転および拡大縮小することもできます。BlockedVolume オブジェクトを作成した後は、bVol を使用して、このオブジェクトのプロパティをクエリおよび変更します。プロパティの一覧については、BlockedVolume Properties を参照してください。
bVol = volshow(bim,Name=Value)ResolutionLevel="coarse" は、表示する解像度レベルを最も粗い解像度レベルに指定します。
メモ
Medical Imaging Toolbox™ は関数 volshow (Image Processing Toolbox™) の機能を拡張し、患者座標系の medicalVolume (Medical Imaging Toolbox) オブジェクトを表示します。詳細については、volshow (Medical Imaging Toolbox) を参照してください。
例
MRI データをワークスペースに読み込み、大きさが 1 の次元を削除します。
load mri
V = squeeze(D);MRI イメージに適したカラーマップと透明度 (アルファ) マップを生成します。
intensity = [0 20 40 120 220 1024]; alpha = [0 0 0.15 0.3 0.38 0.5]; color = [0 0 0; 43 0 0; 103 37 20; 199 155 97; 216 213 201; 255 255 255]/255; queryPoints = linspace(min(intensity),max(intensity),256); alphamap = interp1(intensity,alpha,queryPoints)'; colormap = interp1(intensity,color,queryPoints);
この MRI スキャンのボクセル サイズは不均一、すなわち異方性のある 1×1×2.5 mm です。適切なボクセル次元にイメージをスケーリングする変換行列を指定します。
sx = 1; sy= 1; sz = 2.5; A = [sx 0 0 0; 0 sy 0 0; 0 0 sz 0; 0 0 0 1];
スケーリングを実行する affinetform3d オブジェクトを作成します。
tform = affinetform3d(A);
カスタムのカラーマップ、透明度マップ、および変換を使用してボリュームを表示します。マウスをドラッグして、ボリュームを回転させます。スクロール ホイールを使用して、ボリュームを拡大および縮小します。
vol = volshow(V,Colormap=colormap,Alphamap=alphamap,Transformation=tform);

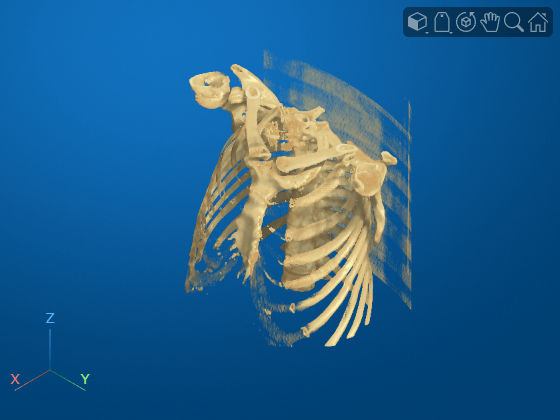
この例では、Medical Segmentation Decathlon データ セット [1] のサブセットを使用します。このサブセット データには、2 つの胸部 CT ボリュームとそれに対応するラベル イメージが含まれており、それらのデータは NIfTI ファイル形式で保存されています。
次のコードを実行し、MathWorks® の Web サイトから MedicalVolumNIfTIData.zip ファイルをダウンロードしてファイルを解凍します。データ ファイルのサイズは約 76 MB です。
zipFile = matlab.internal.examples.downloadSupportFile("medical", ... "MedicalVolumeNIfTIData.zip"); filepath = fileparts(zipFile); unzip(zipFile,filepath)
dataFolder フォルダーには、ダウンロードして解凍したデータが格納されます。
dataFolder = fullfile(filepath,"MedicalVolumeNIfTIData");この例で使用するボリュームとラベル イメージのファイル名を指定します。
dataFile = fullfile(dataFolder,"lung_043.nii.gz"); labelDataFile = fullfile(dataFolder,"LabelData","lung_043.nii.gz");
イメージ ファイルからイメージ データとメタデータを読み取ります。
V = niftiread(dataFile); info = niftiinfo(dataFile);
このボリュームの透明度マップとカラーマップを定義します。この例で使用する値は、手作業による試行錯誤で決定されたものです。
alpha = [0 0 0.7 1.0]; color = [0 0 0; 200 140 75; 231 208 141; 255 255 255] ./ 255; intensity = [-3024 -700 -400 3071]; queryPoints = linspace(min(intensity),max(intensity),256); alphamap = interp1(intensity,alpha,queryPoints)'; colormap = interp1(intensity,color,queryPoints);
この MRI スキャンのボクセル サイズは不均一です (つまり、異方性があります)。ファイルのメタデータからボクセルの間隔を抽出し、正しい寸法でボリュームを表示するための変換を定義します。
voxelSize = info.PixelDimensions; sx = voxelSize(2); sy= voxelSize(1); sz = voxelSize(3); A = [sx 0 0 0; 0 sy 0 0; 0 0 sz 0; 0 0 0 1];
スケーリングを実行する affinetform3d オブジェクトを作成します。
tform = affinetform3d(A);
ボリュームを 3 次元オブジェクトとして表示します。レンダリング スタイルを "CinematicRendering" として指定します。シネマティック レンダリング スタイルでは、各ボクセルに指定された色と透明度に基づいてボリュームが表示され、反復的な後処理によってフォトリアリスティックな影とライティングが生成されます。
viewer = viewer3d; vol = volshow(V,Parent=viewer, ... RenderingStyle="CinematicRendering", ... Colormap=colormap, ... Alphamap=alphamap, ... Transformation=tform);
参考文献
[1] Medical Segmentation Decathlon. "Lung." Tasks. Accessed May 10, 2018. http://medicaldecathlon.com/. Medical Segmentation Decathlon データ セットは、CC-BY-SA 4.0 のライセンスに基づいて提供されています。一切の保証および表明を行いません。詳細については、ライセンスを参照してください。
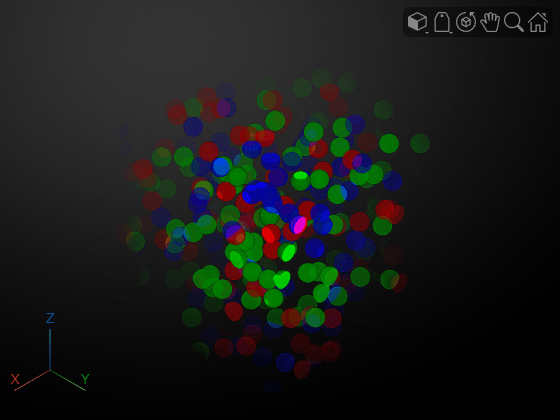
createRGBBubbles 補助関数を使用して、赤、緑、および青のバブルの RGB ボリュームを作成します。補助関数は、この例にサポート ファイルとして添付されています。
RGB = createRGBBubbles;
RGB ボリュームを表示します。
vol = volshow(RGB,RenderingStyle="GradientOpacity");ボリュームの視認性を改善するには、ビューアー ウィンドウの背景色を変更します。
viewer = vol.Parent; viewer.BackgroundColor = [0 0 0]; viewer.GradientColor = [0.2 0.2 0.2];
既定では、volshow は各ボクセルの明度を Alphamap プロパティにマッピングし、各ボクセルの透明度を表示します。ボクセルの明度は、2 次元イメージの rgb2lightness 関数の出力に似ています。
または、AlphaData プロパティを使用してカスタムのアルファ チャネルを指定することもできます。RGBA ボリュームがある場合は、配列のインデックスを使用して 4 番目のチャネルを抽出し、それを AlphaData 値として指定します。このボリュームに対し、ボリュームと同じサイズの人工アルファ チャネルを作成します。
sz = 500; val = linspace(0,1,sz); [X,Y,Z] = meshgrid(val,val,val); alpha = X.*Y.* Z; vol.AlphaData = alpha;
グレースケール ボリュームをワークスペースに読み込み、volshow を使用してそのボリュームを表示します。
load("spiralVol.mat")
h = volshow(spiralVol);
viewer = h.Parent;
hFig = viewer.Parent;
drawnowアニメーションの保存先とする GIF ファイルの名前を指定します。
filename = "animatedSpiral.gif";ボリュームの中心にカメラを向けます。
sz = size(spiralVol); center = sz/2 + 0.5; viewer.CameraTarget = center;

アニメーションのフレーム数を指定してから、ボリュームの中心付近の円内にカメラ位置の配列を作成します。
numberOfFrames =  12;
vec = linspace(0,2*pi,numberOfFrames)';
dist = sqrt(sz(1)^2 + sz(2)^2 + sz(3)^2);
myPosition = center + ([cos(vec) sin(vec) ones(size(vec))]*dist);
12;
vec = linspace(0,2*pi,numberOfFrames)';
dist = sqrt(sz(1)^2 + sz(2)^2 + sz(3)^2);
myPosition = center + ([cos(vec) sin(vec) ones(size(vec))]*dist);各カメラ位置で、表示を更新して、フレームを GIF ファイルに書き込みます。ファイルはビデオ ビューアーで再生できます。
for idx = 1:length(vec) % Update the current view viewer.CameraPosition = myPosition(idx,:); % Capture the image using the getframe function I = getframe(hFig); [indI,cm] = rgb2ind(I.cdata,256); % Write the frame to the GIF file if idx==1 % Do nothing. The first frame displays only the viewer, not the % volume. elseif idx == 2 imwrite(indI,cm,filename,"gif",Loopcount=inf,DelayTime=0) else imwrite(indI,cm,filename,"gif",WriteMode="append",DelayTime=0) end end

この例では、500×500×2500 の大きなイメージ ボリュームを作成します。2.5 GB のボリュームを作成して保存するために十分なメモリがマシンにない場合は、この例を実行する前に、imSize を小さくしてください。
imSize = [500,500,2500];
バブルの 3-D イメージ シミュレーション V を作成します。これには数分かかることがあります。
V = rand(imSize,"single");
BW = false(size(V));
BW(V < 0.000001) = true;
V = bwdist(BW);
V(V <= 20) = 1;
V(V > 20) = 0;V を直接表示しようとすると、volshow はボリュームが大きすぎるというエラーを返します。代わりに、V を指す、ブロック サイズが 500×500×500 ボクセルの blockedImage オブジェクトを作成します。
bim = blockedImage(V,BlockSize=[500,500,500]);
volshow を使用して blockedImage を表示します。関数 volshow は一度に 1 つずつブロックをメモリに読み取り、個々のブロック レンダリングを繋ぎ合わせて最終的なボリュームを生成します。
bVol = volshow(bim);

入力引数
名前と値の引数
出力引数
詳細
バージョン履歴
R2018b で導入参考
ボリューム ビューアー | Volume Properties | BlockedVolume Properties | viewer3d | Surface | isosurface | slice | obliqueslice
トピック
- Display Volume Using Cinematic Rendering
- Display Interior Labels by Clipping Volume Planes
- Display Interior Labels by Adjusting Volume Overlay Properties
- Remove Objects from Volume Display Using 3-D Scissors
- Display Large 3-D Images Using Blocked Volume Visualization
- Display Translucent Volume with Advanced Light Scattering