dsp.Differentiator
Direct form FIR fullband differentiator filter
Description
The dsp.Differentiator
System object™ applies a fullband differentiator filter on the input signal to differentiate
all its frequency components. This object uses an FIR equiripple filter design to design the
differentiator filter. The ideal frequency response of the differentiator is for . You can design the filter with minimum order with a specified order. This
object supports fixed-point operations.
To filter each channel of your input:
Create the
dsp.Differentiatorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
This object supports C/C++ code generation and SIMD code generation under certain conditions. For more information, see Code Generation.
Creation
Description
DF = dsp.DifferentiatorDF, which independently filters each channel of the
input over time using the given design specifications.
DF = dsp.Differentiator(PropertyName=Value)FilterOrder to 15.
Properties
Usage
Syntax
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Estimate the group delay of a linear phase FIR filter using a dsp.TransferFunctionEstimator object followed by dsp.PhaseExtractor and dsp.Differentiator objects. The group delay of a linear phase FIR filter is given by  , where
, where  is the phase information of the filter,
is the phase information of the filter,  is the frequency vector, and N is the order of the filter.
is the frequency vector, and N is the order of the filter.
Set Up the Objects
Create a linear phase FIR lowpass filter. Set the order to 200, the passband frequency to 255 Hz, the passband ripple to 0.1 dB, and the stopband attenuation to 80 dB. Specify a sample rate of 512 Hz.
Fs = 512;
LPF = dsp.LowpassFilter(SampleRate=Fs,PassbandFrequency=255,...
DesignForMinimumOrder=false,FilterOrder=200);
To estimate the transfer function of the lowpass filter, create a transfer function estimator. Specify the window to be Hann. Set the FFT length to 1024 and the number of spectral averages to 200.
TFE = dsp.TransferFunctionEstimator(FrequencyRange="twosided",... SpectralAverages=200,FFTLengthSource="Property",... FFTLength=1024);
To extract the unwrapped phase from the frequency response of the filter, create a phase extractor.
PE = dsp.PhaseExtractor;
To differentiate the phase  , create a differentiator filter. This value is used in computing the group delay.
, create a differentiator filter. This value is used in computing the group delay.
DF = dsp.Differentiator;
To smoothen the input, create a variable bandwidth FIR filter.
Gain1 = 512/pi;
Gain2 = -1;
VBFilter = dsp.VariableBandwidthFIRFilter(CutoffFrequency=10,...
SampleRate=Fs);
To view the group delay of the filter, create an array plot object.
AP = dsp.ArrayPlot(PlotType="Line",YLimits=[-500 400],... YLabel="Amplitude",XLabel="Number of samples");
Run the Algorithm
The for-loop is the streaming loop that estimates the group delay of the filter. In the loop, the algorithm filters the input signal, estimates the transfer function of the filter, and differentiates the phase of the filter to compute the group delay.
Niter = 1000; % Number of iterations for k = 1:Niter x = randn(512,1); % Input signal = white Gaussian noise y = LPF(x); % Filter noise with Lowpass FIR filter H = TFE(x,y); % Compute transfer function estimate Phase = PE(H); % Extract the Unwrapped phase phaseaftergain1 = Gain1*Phase; DiffOut = DF(phaseaftergain1); % Differentiate the phase phaseaftergain2 = Gain2 * DiffOut; VBFOut = VBFilter(phaseaftergain2); % Smooth the group delay AP(VBFOut); % Display the group delay end
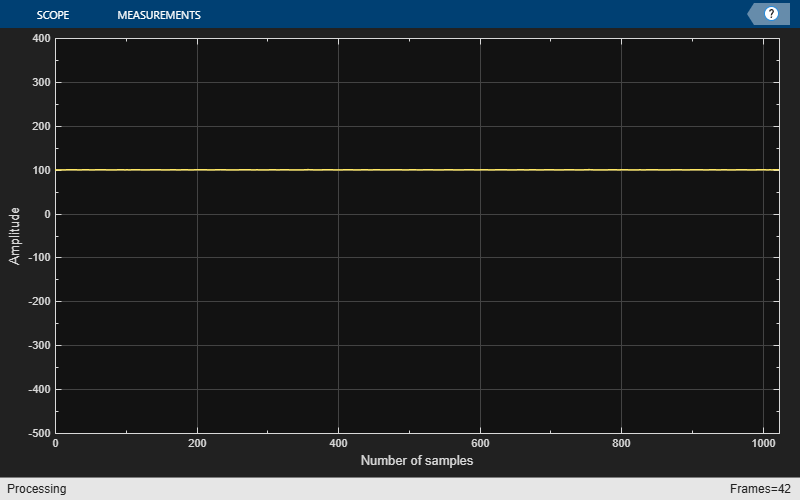
As you can see, the group delay of the lowpass filter is 100.
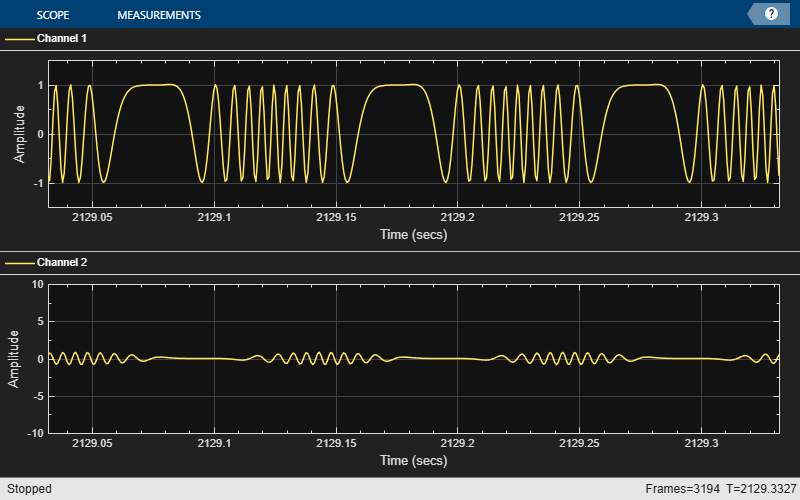
Create an FM wave on a 100 Hz carrier signal sampled at 1.5 kHz.
Fc = 1e2; % Carrier Fs = 1.5e3; % Sample rate sinewave = dsp.SineWave(Frequency=10,... SamplesPerFrame=1e3,... SampleRate=Fs);
Convert the FM signal to an AM signal.
ts = timescope(TimeSpanSource="Property",... TimeSpan=0.3,... BufferLength=10*Fs,... SampleRate=Fs,... ShowGrid=true,... YLimits=[-1.5 1.5],... LayoutDimensions=[2 1]); df = dsp.Differentiator; tic while toc<2.2 x = step(sinewave); fm_y = modulate(x,Fc,Fs,"fm"); am_y = step(df,fm_y); step(ts,fm_y,am_y); end release(df); release(ts);
Algorithms
Differentiator computes the derivative of a signal. The frequency response of an ideal differentiator filter is given by , defined over the Nyquist interval .

The frequency response is antisymmetric and is linearly proportional to the frequency.
dsp.Differentiator object acts as a differentiator
filter. This object condenses the two-step process into one. For the
minimum order design, the object uses generalized Remez FIR filter
design algorithm. For the specified order design, the object uses
the Parks-McClellan optimal equiripple FIR filter design algorithm.
The filter is designed as a linear phase Type-IV FIR filter with a
Direct form structure.
The ideal differentiator has an antisymmetric impulse response given by . Hence . The differentiator must have zero response at zero frequency.
Linear-Phase FIR Differentiator Filter
The impulse response of an antisymmetric linear-phase FIR filter is given by , where M is the length of the filter. Because the filter is antisymmetric, you can use this type of FIR filter to design the linear-phase FIR differentiators.
Consider the design of linear-phase FIR differentiators based on the Chebyshev approximation criterion.
If M is odd, the real-valued frequency response of the FIR filter, Hr(ω), has the characteristics that Hr(0) = 0 and Hr(π) = 0. This filter satisfies the condition of zero response at zero frequency. However, it is not fullband because Hr(π) = 0. This differentiator has a linear response over the limited frequency range [0 2πfp], where fp is the bandwidth of the differentiator. The absolute error between the desired response and the Chebyshev approximation increases as ω increases from 0 to 2πfp.
If M is even, the real-valued frequency response of the FIR filter, Hr(ω), has the characteristics that Hr(0) = 0 and Hr(π) ≠ 0. This filter satisfies the condition of zero response at zero frequency. It is fullband and this design results in a significantly smaller approximation error than comparable odd-length differentiators. Hence, even-length (odd order) differentiators are preferred in practical systems.
References
[1] Orfanidis, Sophocles J. Introduction to Signal Processing. Upper Saddle River, NJ: Prentice-Hall, 1996.
Extended Capabilities
Version History
Introduced in R2016a
See Also
Functions
Objects
dsp.HighpassFilter|dsp.VariableBandwidthFIRFilter|dsp.VariableBandwidthIIRFilter|dsp.FIRFilter|dsp.SOSFilter