位置推定と地図作成
SLAM (自己位置推定と環境地図作成の同時実行) アルゴリズムを使用して、環境地図作成と自車の姿勢推定を同時に行います。SLAM アルゴリズムは、ビジュアル データまたは点群データで使用できます。カメラ イメージ データを使用した visual SLAM の実装の詳細については、MATLAB での Visual SLAM の実装およびDevelop Visual SLAM Algorithm Using Unreal Engine Simulationを参照してください。LiDAR データを使用した点群 SLAM の実装の詳細については、MATLAB での点群 SLAM の実装およびDesign Lidar SLAM Algorithm Using Unreal Engine Simulation Environmentを参照してください。
慣性計測ユニット (IMU) や全地球測位システム (GPS) などのセンサーからの測定値を使用して、ビジュアル データまたは LiDAR データによる地図作成プロセスを改善できます。例については、LiDAR データからのマップの作成を参照してください。
既知のマップが存在する環境では、マップの座標系の原点を基準にして自車の姿勢を推定することで、自車の位置を特定できます。既知のビジュアル マップを使用した位置推定の例については、Visual Localization in a Parking Lotを参照してください。既知の点群マップを使用した位置推定の例については、Lidar Localization with Unreal Engine Simulationを参照してください。
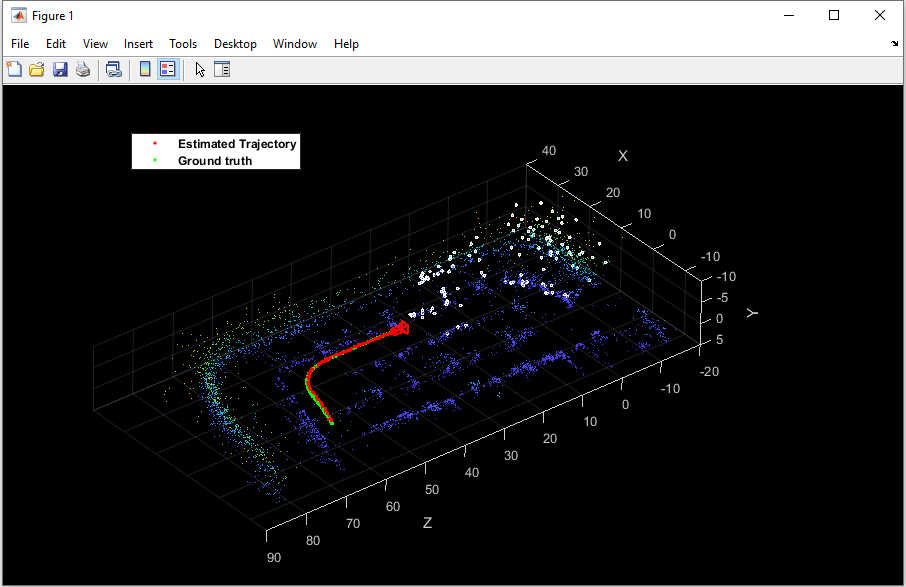
既知のマップが存在しない環境では、ビジュアル データと IMU データを融合することでビジュアル慣性オドメトリを使用して、開始姿勢に対する自車の姿勢を推定できます。例については、Visual-Inertial Odometry Using Synthetic Dataを参照してください。
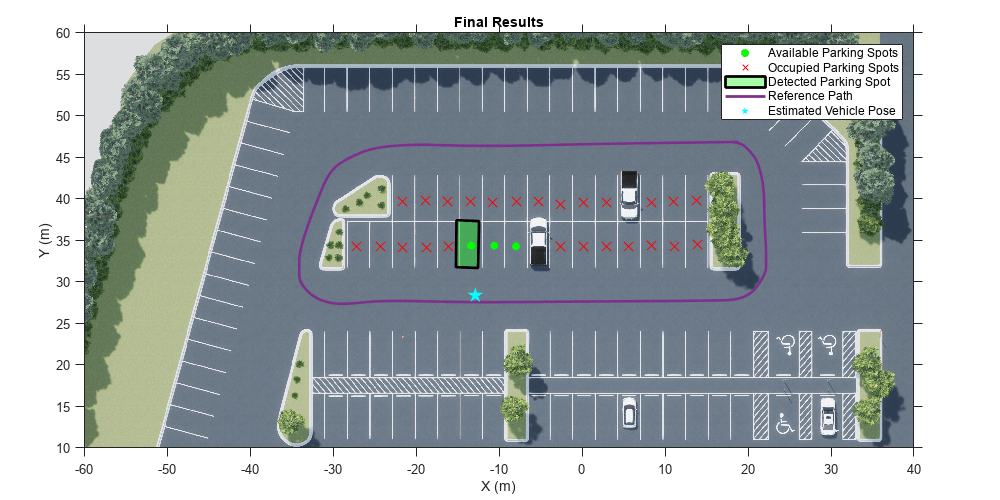
駐車場の空き駐車スポットを検出する地図作成および位置アルゴリズムのアプリケーションについては、Perception-Based Parking Spot Detection Using Unreal Engine Simulationを参照してください。
関数
トピック
- Rotations, Orientations, and Quaternions for Automated Driving
Quaternions are four-part hypercomplex numbers that are used to describe three-dimensional rotations and orientations. Learn how to use them for automated driving applications.
- MATLAB での Visual SLAM の実装
Visual simultaneous localization and mapping (vSLAM) ワークフローと、MATLAB を使用してそれを実装する方法について理解する。
- 単眼の Visual Simultaneous Localization and Mapping
Visual simultaneous localization and mapping (vSLAM)。
- MATLAB での点群 SLAM の実装
点群のレジストレーションと地図作成のワークフローを理解する。
注目の例

Lidar Localization with Unreal Engine Simulation
Develop and evaluate a lidar localization algorithm using synthetic lidar data from the Unreal Engine® simulation environment.
Visual Localization in a Parking Lot
Develop a visual localization system using synthetic image data from a parking lot scene in Unreal Engine environment.

Develop Visual SLAM Algorithm Using Unreal Engine Simulation
Develop a visual simultaneous localization and mapping (SLAM) algorithm using image data from the Unreal Engine simulation environment.

LiDAR データからのマップの作成
慣性計測ユニット (IMU) の読み取り値を補助的に使用し、3-D LiDAR センサー データを処理して、マップを順次作成します。

Design Lidar SLAM Algorithm Using Unreal Engine Simulation Environment
Develop a simultaneous localization and mapping algorithm using synthetic lidar sensor data recorded from the Unreal Engine simulation environment.

Perception-Based Parking Spot Detection Using Unreal Engine Simulation
Build a bird's-eye-view map of a parking lot using semantically segmented images from the ego vehicle camera, and detect empty parking spots from the map.
Perception Based Live Parking Spot Detection Using Unreal Engine Simulation
Develop a live parking spot detection system using deep learning and SLAM.

Motion Compensation in 3-D Lidar Point Clouds Using Sensor Fusion
Compensate point cloud distortion due to ego-vehicle motion by fusing GPS and IMU data.
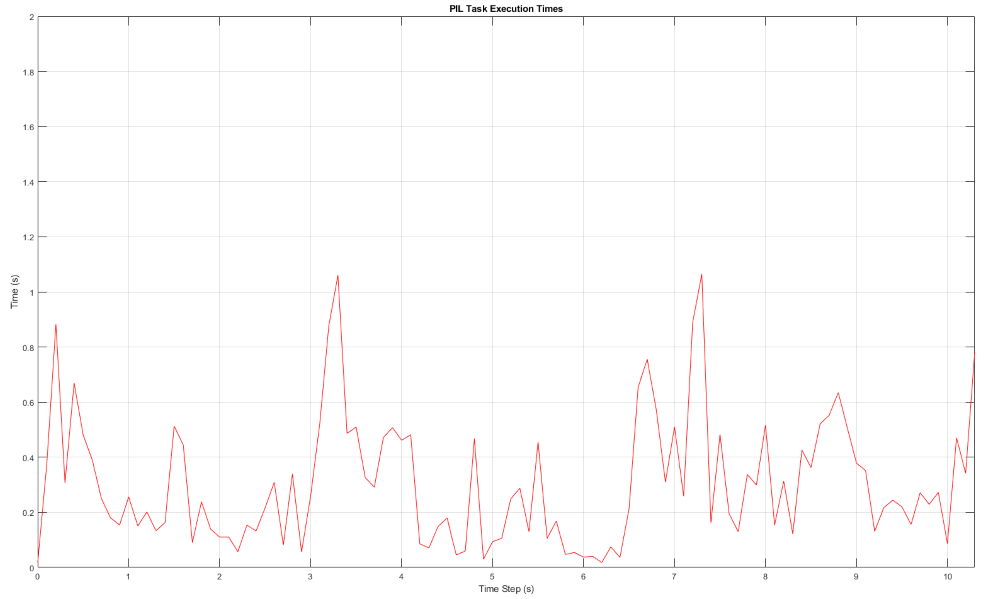
PIL Verification of Generated Code for Map Creation Using Lidar SLAM
Design a lidar SLAM algorithm for map creation, generate embedded code of the algorithm, and verify it using processor-in-the-loop (PIL) simulation on NVIDIA® Jetson™ hardware.

Build a Map with Lidar Odometry and Mapping (LOAM) Using Unreal Engine Simulation
Build a map with the lidar odometry and mapping (LOAM) [1] algorithm by using synthetic lidar data from the Unreal Engine® simulation environment. In this example, you learn how to:

Build Occupancy Map from 3-D Lidar Data Using SLAM
Build a 2-D Occupancy map from 3-D Lidar data using a simultaneous localization and mapping (SLAM) algorithm.

Build Map and Localize Using Segment Matching
Build a map with lidar data and localize the position of a vehicle on the map using
SegMatch, a place recognition algorithm based on segment
matching.

Visual-Inertial Odometry Using Synthetic Data
Estimate the position and orientation of a vehicle by using an inertial measurement unit (IMU) and a monocular camera.

GPU での SLAM の使用による LiDAR データからのマップ作成
NVIDIA GPU で生成されたコードを使用して、3 次元の自己位置推定と環境地図作成の同時実行 (SLAM) を実行する。