los
見通し内 (LOS) の可視性ステータスの表示または計算
説明
los( は、1 つ以上の名前と値の引数を指定します。たとえば、site1,site2,Name=Value)ObstructedColor 引数は、可視性が妨げられたことを示す色を指定します。
vis = los(site1,site2,Name,Value)
例
アンテナ高さが 30 m の送信機サイトを作成し、受信機サイトを地表面に作成します。
tx = txsite("Name","MathWorks Apple Hill",... "Latitude",42.3001,"Longitude",-71.3504,"AntennaHeight",30); rx = rxsite("Name","MathWorks Lakeside", ... "Latitude",42.3021,"Longitude",-71.3764);
2 つのサイト間の LOS をプロットします。
los(tx,rx)
![]()
アンテナ高さが 30 m の送信機サイトを作成し、アンテナをもつ 2 つの受信機サイトを地表面に作成します。
tx = txsite("Name","MathWorks Apple Hill",... "Latitude",42.3001,"Longitude",-71.3504,"AntennaHeight",30); names = ["Fenway Park","Bunker Hill Monument"]; lats = [42.3467,42.3763]; lons = [-71.0972,-71.0611];
受信機サイトの配列を作成します。
rxs = rxsite("Name", names,... "Latitude",lats,... "Longitude",lons);
受信機サイトへの LOS をプロットします。LOS の赤い部分は、可視性が妨げられていることを表します。
los(tx,rxs)
![]()
STL ファイルをインポートして表示します。このファイルはテーブル 1 台と椅子が 4 脚ある小さい会議室をモデル化したものです。
viewer = siteviewer("SceneModel","conferenceroom.stl");
部屋の天井隅付近に送信機サイトを作成し、テーブルの上に受信機サイトを作成します。直交座標を使用してメートル単位で位置を指定します。
tx = txsite("cartesian", ... "AntennaPosition",[-1.46; -1.42; 2.1]); rx = rxsite("cartesian", ... "AntennaPosition",[0.3; 0.3; 0.85]);
送信機と受信機との間の LOS をプロットします。
los(rx,tx)
パンするには左クリックします。ズームするには右クリックまたはスクロール ホイールを使用します。表示を回転させるには、中央ボタンをクリックしてドラッグするか、"Ctrl" を押しながら左クリックしてドラッグします。

シカゴでレイ トレーシングを実行し、comm.Ray オブジェクトにその光線を返します。次に、レイ トレーシング解析を実行せずに光線を再度表示します。
シカゴの建物を指定してサイト ビューアーを起動します。OpenStreetMap® ファイルの詳細については、[1] を参照してください。
viewer = siteviewer(Buildings="chicago.osm");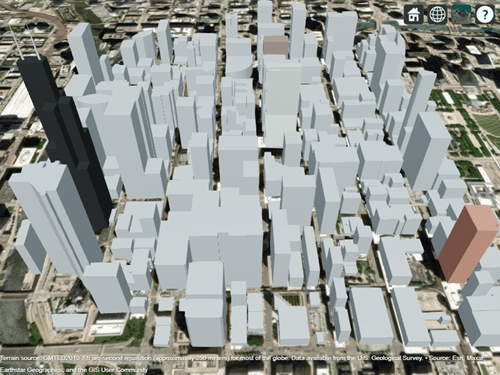
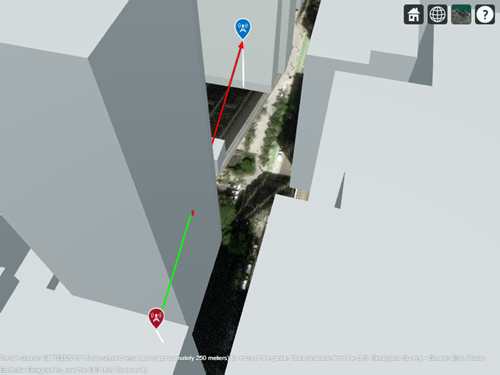
ある建物の上に送信機サイト、別の建物の上に受信機サイトを作成します。関数 los を使用して、サイト間の見通し内パスを表示します。
tx = txsite(Latitude=41.8800, ... Longitude=-87.6295, ... TransmitterFrequency=2.5e9); rx = rxsite(Latitude=41.881352, ... Longitude=-87.629771, ... AntennaHeight=30); los(tx,rx)
レイ トレーシング伝播モデルを作成します。MATLAB® は、RayTracing オブジェクトを使用してこのモデルを表現します。既定では、このモデルは SBR 法を使用し、最大 2 回の反射を伴う伝播パスを計算します。
pm = propagationModel("raytracing");レイ トレーシング解析を実行します。関数 raytrace は、comm.Ray オブジェクトを含む cell 配列を返します。
rays = raytrace(tx,rx,pm)
rays = 1×1 cell array
{1×3 comm.Ray}
最初の ray オブジェクトのプロパティを表示します。
rays{1}(1)ans =
Ray with properties:
PathSpecification: 'Locations'
CoordinateSystem: 'Geographic'
TransmitterLocation: [3×1 double]
ReceiverLocation: [3×1 double]
LineOfSight: 0
Interactions: [1×1 struct]
Frequency: 2.5000e+09
PathLossSource: 'Custom'
PathLoss: 92.7686
PhaseShift: 1.2945
Read-only properties:
PropagationDelay: 5.7088e-07
PropagationDistance: 171.1462
AngleOfDeparture: [2×1 double]
AngleOfArrival: [2×1 double]
NumInteractions: 1
サイト ビューアーを閉じます。
close(viewer)
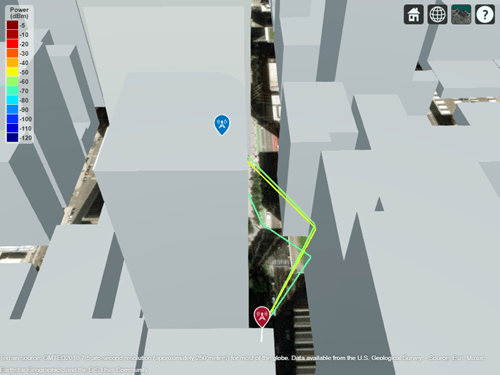
同じ建物、送信機サイト、受信機サイトを使用して、別のサイト ビューアーを作成します。次に、伝播パスを表示します。または、rays{1}(2) のように、単一の ray オブジェクトを指定してパスを個別にプロットすることもできます。
siteviewer(Buildings="chicago.osm"); show(tx) show(rx) plot(rays{1},Type="power", ... TransmitterSite=tx,ReceiverSite=rx)
付録
[1] OpenStreetMap ファイルは、クラウドソーシングによる世界中の地図データへのアクセスを提供する https://www.openstreetmap.org からダウンロードされたものです。このデータは Open Data Commons Open Database License (ODbL) https://opendatacommons.org/licenses/odbl/ によりライセンスされています。
入力引数
名前と値の引数
オプションの引数のペアを Name1=Value1,...,NameN=ValueN として指定します。ここで、Name は引数名で、Value は対応する値です。名前と値の引数は他の引数の後に指定しなければなりませんが、ペアの順序は重要ではありません。
R2021a より前では、コンマを使用して名前と値をそれぞれ区切り、Name を引用符で囲みます。
例: 'ObstructedColor','blue'
可視性を確保できた場合のプロットの色。次のいずれかとして指定します。
各要素が色の赤、緑、青の成分の強度を指定する RGB 3 成分。強度は
[0,1]の範囲でなければなりません (例:[0.4 0.6 0.7])。文字ベクトル (
'red'や'r'など)。string スカラー (
"red"や"r"など)。
よく使われる色の色名、およびそれらと等価な RGB 3 成分を次の表に示します。
| 色名 | 省略名 | RGB 3 成分 | 外観 |
|---|---|---|---|
"red" | "r" | [1 0 0] |
|
"green" | "g" | [0 1 0] |
|
"blue" | "b" | [0 0 1] |
|
"cyan" | "c" | [0 1 1] |
|
"magenta" | "m" | [1 0 1] |
|
"yellow" | "y" | [1 1 0] |
|
"black" | "k" | [0 0 0] |
|
"white" | "w" | [1 1 1] |
|








可視性が妨げられた場合のプロットの色。次のいずれかとして指定します。
各要素が色の赤、緑、青の成分の強度を指定する RGB 3 成分。強度は
[0,1]の範囲でなければなりません (例:[0.4 0.6 0.7])。文字ベクトル (
'red'や'r'など)。string スカラー (
"red"や"r"など)。
よく使われる色の色名、およびそれらと等価な RGB 3 成分を次の表に示します。
| 色名 | 省略名 | RGB 3 成分 | 外観 |
|---|---|---|---|
"red" | "r" | [1 0 0] |
|
"green" | "g" | [0 1 0] |
|
"blue" | "b" | [0 0 1] |
|
"cyan" | "c" | [0 1 1] |
|
"magenta" | "m" | [1 0 1] |
|
"yellow" | "y" | [1 1 0] |
|
"black" | "k" | [0 0 0] |
|
"white" | "w" | [1 1 1] |
|
見通し内の可視性の計算に使用されるサンプル位置の分解能。"auto"、またはメートル単位で表された数値スカラーとして指定します。Resolution は、球状の地球モデルを使用した大圏パス上にあるサンプル間の距離を定義します。Resolution が "auto" である場合、関数は、サイト間の距離に基づいて値を計算します。
可視化または表面データのマップ。siteviewer オブジェクト、triangulation オブジェクト、string スカラー、文字ベクトルのいずれかとして指定します。有効な既定値は、座標系に応じて異なります。
| 座標系 | 有効なマップ値 | 既定のマップ値 |
|---|---|---|
"geographic" |
|
|
"cartesian" |
|
|
a Alignment of boundaries and region labels are a presentation of the feature provided by the data vendors and do not imply endorsement by MathWorks®. | ||
ほとんどの場合、この引数を siteviewer や "none" 以外の値として指定した場合は出力引数も指定しなければなりません。
出力引数
制限
長距離では LOS 可視性ステータスの精度が浮動小数点の精度によって制限される可能性があります。
バージョン履歴
R2019b で導入