comm.SphereDecoder
球面復号化器を使用した入力の復号化
説明
comm.SphereDecoder System object™ は、NT 本のアンテナにわたって送信されたシンボルを、球面復号化アルゴリズムで復号化します。
球面復号化アルゴリズムを使用してシンボルを復号化するには、次のようにします。
comm.SphereDecoderオブジェクトを作成し、そのプロパティを設定します。関数と同様に、引数を指定してオブジェクトを呼び出します。
System object の機能の詳細については、System object とはを参照してください。
作成
構文
説明
spheredecod = comm.SphereDecoderspheredecod を作成します。このオブジェクトは、球面復号化アルゴリズムを使用してシンボルを復号化します。
spheredecod = comm.SphereDecoder(const,bitTab)Constellation プロパティを const に、BitTable プロパティを bitTab に設定します。
spheredecod = comm.SphereDecoder(___,Name=Value)spheredecod(InitialRadius="ZF solution") は、復号化アルゴリズムの初期探索半径を "ZF solution" に設定します。
プロパティ
使用法
入力引数
出力引数
オブジェクト関数
オブジェクト関数を使用するには、System object を最初の入力引数として指定します。たとえば、obj という名前の System object のシステム リソースを解放するには、次の構文を使用します。
release(obj)
例
16-QAM コンスタレーションを使用してビット セットを変調し、MIMO チャネルを介して 2 つの並列ストリームで信号を送信し、完全なチャネル認識をもつ球面復号化器を使用してビットを復号化します。
変調次数、送信ビット数、およびシンボル マッピングを指定します。
bps = 4; % Bits per symbol M = 2^bps; % Modulation order nBits = 1e3*bps; % Number of transmitted bits symMap = [11 10 14 15 9 8 12 13 1 0 4 5 3 2 6 7]; % Symbol mapping
関数 qammod とカスタム シンボル マップを使用して、16-QAM 変調器のシンボル マッピングを生成して表示します。
sym = qammod(symMap(1:M)',M,symMap, ...
UnitAveragePower=true,PlotConstellation=true);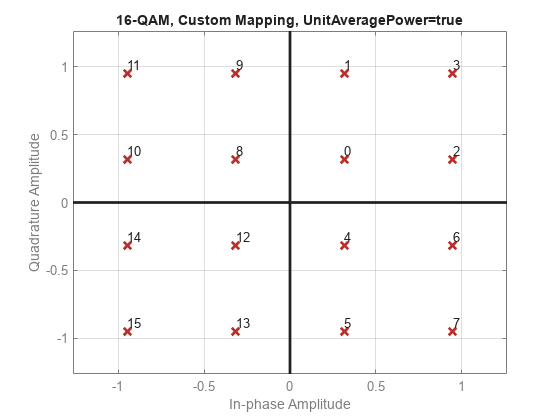
左端のビットを最上位ビット (MSB) として使用し、シンボル マップの 10 進数値をバイナリ ビットに変換します。球面復号化器は、この目的のために M 行 bps 列の行列 bitTable を利用します。
bitTable = int2bit(symMap,bps)';
2 行 2 列の MIMO チャネル System object を作成します。パス ゲインをチャネル推定として使用するには、PathGainsOutputPort を true に設定します。結果の反復性を保証するため、グローバル乱数ストリームを使用するようにオブジェクトを設定します。
mimo = comm.MIMOChannel( ... PathGainsOutputPort=true, ... RandomStream="Global stream");
硬判定復号化を使用してビットを処理する球面復号化器 System object を作成し、カスタム ビット テーブルとシンボル マップを使用して構成します。
sphDec = comm.SphereDecoder(Constellation=sym, ... BitTable=bitTable,DecisionType="Hard");
エラー レート System object を作成します。
berRate = comm.ErrorRate;
グローバル乱数発生器のシードの設定
rng(37)
ランダム データ ストリームを生成します。
data = randi([0 1],nBits,1);
データを変調し、2x2 MIMO チャネル用の 2 つのストリームに形状を変更します。
modData = qammod(data,M,symMap, ... InputType="bit",UnitAveragePower=true); modData = reshape(modData,[],2);
変調データを MIMO フェージング チャネルを経由して渡し、ホワイト ガウス ノイズを付加します。
[fadedSig,pathGains] = mimo(modData); rxSig = awgn(fadedSig,10);
pathGains を完全なチャネル推定として使用して、受信信号を復号化します。
decodedData = sphDec(rxSig,squeeze(pathGains));
誤りの計算を有効にするため、復号化された硬判定データ (logical 行列) を、倍精度列ベクトルに変換します。次に、ビット エラー レートおよび誤り数を計算して表示します。
dataOut = double(decodedData(:)); errorStats = berRate(data,dataOut); errorStats(1:2)
ans = 2×1
0.1660
664.0000
制限
出力された LLR 値はノイズ分散によってスケーリングされません。反復符号化 (LDPC またはターボ) またはビタビ復号化による MIMO OFDM を採用した符号化リンクでは、パフォーマンスを向上させるために、出力 LLR 値をチャネル状態情報でスケーリングします。
アルゴリズム
このオブジェクトは、ツリー トラバーサルの単一ツリー探索 (STS) として実行される軟出力シュノール・オイヒナー球面復号化器 (SESD) を使用して、MIMO システム用の軟出力最大対数事後確率 (APP) 検出器を実装します。このアルゴリズムは、すべての送信アンテナが同じコンスタレーションとビット テーブルを使用するという前提で動作します。これは、受信したシンボル ベクトルと推定されたチャネル行列を入力として受け取り、送信ビットの対数尤度比 (LLR) を出力します。
このアルゴリズムは、NT 個の送信アンテナと NR 個の受信アンテナをもつ MIMO システムをモデル化します。システムは NT 個のシンボルを同時に送信するという前提で、y = Hs + n という式で表されます。ここで、y は受信シンボル、H は MIMO チャネル行列、s は送信シンボル ベクトル、n は熱ノイズです。
MIMO 検出器は、最尤 (ML) 解 を求めます。これは、次のようになります。
ここで、O は複素数値のコンスタレーションであり、検出器はそこから s の NT 個の要素を選択します。
軟検出はビットごとの推定の信頼性を測定するのに役立つビットごとの対数尤度比 (LLR) をも計算します。LLR は、最大対数近似を使用して次のように計算されます。
ここで、
L(xj,b) は、各ビットの LLR 推定値です。
は、それぞれ送信されたビット、 j 番目のシンボルの b 番目のビットです。
と は、j 番目のスカラー シンボルのラベル内の b 番目のビットがそれぞれ 0 および 1 であるベクトル シンボルの互いに素な集合です。2 つの記号 λ は二乗ノルムとして計算された距離を表します。具体的には、次のようになります。
は、距離 です。
は、対抗仮説までの距離です。これは の j 番目のエントリのバイナリ ラベル内の b 番目のビットのバイナリ補数、つまり最小限のシンボル セット を表します。このシンボル セットには、j 番目のエントリの b 番目のビットが の同じエントリと比較して反転された、可能性のあるすべてのベクトルが含まれます。
ビット の LLR 推定値を計算する式は、 が 0 か 1 かによって異なります。
復号化器の設計は 、、および を効率的に見つけることを目的とします。
この探索は、球面復号化アルゴリズムによってツリー探索に変換できます。これには、QR 分解によってチャネル行列を に分解することが含まれます。次に、y を QH に左から乗算することで、問題は次のように再定式化されます。
この再定式化された問題の定義を使用して、ここから R の三角構造を利用し、可能性のある s ベクトルをリーフ ノードとするツリー構造を作成し、ツリーの各ノードまでの部分距離を計算して親ノードの部分距離に累積的に加算できます。
STS アルゴリズムでは、 と のメトリクスを同時に探索します。目標は、メトリクス とそれに対応するビット シーケンス およびすべての対抗仮説のメトリクス を含むリストを作成することです。続いて、 または の更新につながる可能性がある場合にのみ、ある特定のノードからのサブツリーが探索されます。
STS アルゴリズムには基本的に次の手順が含まれます。
リーフ ノードに達したときに新しい ML 仮説が見つかった場合 、 であるすべての が に設定され、次にそれが評価された対抗仮説になります。次に、 が現在の距離 d(x) に設定されます。
の場合は、必要となるのは対抗仮説のチェックだけです。 かつ であるすべての j と b について、復号化器は を d(x) に更新します。
ノードの部分距離が現在の 値 (サブツリーのトラバーサル中に変更される可能性のある値) を超えると、アルゴリズムはそのサブツリーを枝刈りすることを決定します。
STS アルゴリズムは、各ツリー ノードに 1 回到達するか、またはそれらを枝刈りすると停止します。
参照
[1] Studer, C., A. Burg, and H. Bolcskei. “Soft-Output Sphere Decoding: Algorithms and VLSI Implementation.” IEEE Journal on Selected Areas in Communications 26, no. 2 (February 2008): 290–300. https://doi.org/10.1109/JSAC.2008.080206.
[2] Cho, Yong Soo, ed. MIMO-OFDM Wireless Communications with MATLAB. Singapore ; Hoboken, NJ: IEEE Press : J. Wiley & Sons (Asia), 2010.
[3] Hochwald, B.M., and S. Ten Brink. “Achieving Near-Capacity on a Multiple-Antenna Channel.” IEEE Transactions on Communications 51, no. 3 (March 2003): 389–99. https://doi.org/10.1109/TCOMM.2003.809789.
[4] Agrell, E., T. Eriksson, A. Vardy, and K. Zeger. “Closest Point Search in Lattices.” IEEE Transactions on Information Theory 48, no. 8 (August 2002): 2201–14. https://doi.org/10.1109/TIT.2002.800499.
拡張機能
バージョン履歴
R2013a で導入