このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
CAN 通信用の Simulink モデルをプログラムで構築する
この例では、CAN DBC ファイルを使用して CAN または CAN FD 通信を導入するための Simulink ® モデルをプログラムで構築する方法を示します。Simulink の add_block (Simulink) 関数と set_param (Simulink) 関数を使用すると、Vehicle Network Toolbox ™ ブロックを追加して完全に構成し、基本アルゴリズムにネットワーク通信を追加できます。DBC ファイルには、CAN メッセージと信号の詳細が含まれています。主な焦点は、CAN および CAN FD の Pack および Unpack ブロック パラメータをプログラムで構成することです。これにより、モデル構築の効率が大幅に向上します。
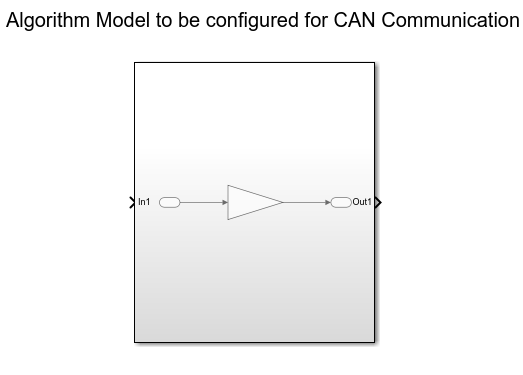
アルゴリズムモデル
サンプルモデル AlgorithmModel.slx には、「アルゴリズム」と呼ばれるサブシステム ブロックが含まれています。このブロックは、Simulink で開発された任意のアプリケーション アルゴリズムを表します。値が 2 の Gain (Simulink) ブロックは、デモンストレーションの目的でこのサブシステム内にあります。このサブシステムには、「In1」という名前の CAN 信号入力があります。この入力値はゲイン値によってスケーリングされます。スケールされた値は、このサブシステムの「Out1」という名前の出力として与えられます。実験のために、ゲイン値を変更したり、Gain ブロックを別のアルゴリズムに置き換えたりすることができます。
CANデータベースファイルアクセス
canDatabase 関数を使用して、CAN DBC ファイルの内容にアクセスできます。この関数により、ネットワーク ノード、メッセージ、信号に関する詳細情報を入手できます。
db = canDatabase("CANBus.dbc")db =
Database with properties:
Name: 'CANBus'
Path: 'C:\Users\jpyle\Documents\MATLAB\Examples\vnt-ex60686316\CANBus.dbc'
Nodes: {'ECU'}
NodeInfo: [1×1 struct]
Messages: {2×1 cell}
MessageInfo: [2×1 struct]
Attributes: {}
AttributeInfo: [0×0 struct]
UserData: []
以下に示すように、サンプル CAN DBC ファイルではノード「ECU」が定義されています。
node = nodeInfo(db,"ECU")node = struct with fields:
Name: 'ECU'
Comment: ''
Attributes: {}
AttributeInfo: [0×0 struct]
ノードは、信号「InitialValue」を含む CAN メッセージ「AlgInput」を受信します。信号「InitialValue」はアルゴリズムへの入力です。
messageInfo(db,"AlgInput")ans = struct with fields:
Name: 'AlgInput'
ProtocolMode: 'CAN'
Comment: ''
ID: 100
Extended: 0
J1939: []
Length: 1
DLC: 1
BRS: 0
Signals: {'InitialValue'}
SignalInfo: [1×1 struct]
TxNodes: {0×1 cell}
Attributes: {}
AttributeInfo: [0×0 struct]
ノードは、信号「ScaledValue」を含む CAN メッセージ「AlgOutput」を送信します。信号「ScaledValue」はアルゴリズムの出力です。
messageInfo(db,"AlgOutput")ans = struct with fields:
Name: 'AlgOutput'
ProtocolMode: 'CAN'
Comment: ''
ID: 200
Extended: 0
J1939: []
Length: 2
DLC: 2
BRS: 0
Signals: {'ScaledValue'}
SignalInfo: [1×1 struct]
TxNodes: {'ECU'}
Attributes: {}
AttributeInfo: [0×0 struct]
プログラムでモデルを構築する
モデル例を開く
設定するサンプルモデルを開きます。
open AlgorithmModelCAN Configurationブロックの追加と設定
モデルに CAN Configuration ブロックを追加して配置します。
add_block("canlib/CAN Configuration","AlgorithmModel/CAN Configuration") set_param("AlgorithmModel/CAN Configuration","position",[50,330,250,410])
モデルが MathWorks ® 仮想 CAN デバイスを使用するように、「デバイス」パラメータを設定します。
set_param("AlgorithmModel/CAN Configuration","Device","MathWorks Virtual 1 (Channel 1)")
CAN Receiveブロックの追加と設定
モデルに CAN Receive ブロックを追加して配置します。
add_block("canlib/CAN Receive","AlgorithmModel/CAN Receive") set_param("AlgorithmModel/CAN Receive","position",[50,200,250,280])
Terminator (Simulink) ブロックを追加して配置します。これは、CAN Receive ブロックの関数ポートを接続するために使用されます。この例では、単純なメッセージ受信が実行されます。一般的に、CAN ブロックを使用してモデリングする場合、CAN Receive を Function-Call Subsystem (Simulink) 内に配置するのが推奨されるアプローチです。
add_block("simulink/Sinks/Terminator","AlgorithmModel/Terminator") set_param("AlgorithmModel/Terminator","position",[310,210,330,230])
モデルが MathWorks 仮想 CAN デバイスを使用するように、「デバイス」パラメータを設定します。
set_param("AlgorithmModel/CAN Receive","Device","MathWorks Virtual 1 (Channel 1)")
CAN Unpack ブロックの追加と設定
モデルに CAN Unpack ブロックを追加して配置します。デフォルトでは、ブロックは「Raw Data」モードになっています。
add_block("canlib/CAN Unpack","AlgorithmModel/CAN Unpack") set_param("AlgorithmModel/CAN Unpack","position",[350,220,600,300])
1 回の関数呼び出しで、CAN Unpack ブロックに次のパラメータを設定します。
DataFormat
CANdbファイル
MsgList
set_param("AlgorithmModel/CAN Unpack","DataFormat","CANdb specified signals","CANdbFile",db.Path,"MsgList","AlgInput")
ブロックに「DataFormat」および「CANdbFile」パラメータがすでに設定されている場合、「MsgList」パラメータを追加するだけで選択したメッセージを変更できます。
CAN Pack ブロックの追加と設定
モデルに CAN Pack ブロックを追加して配置します。
add_block("canlib/CAN Pack","AlgorithmModel/CAN Pack") set_param("AlgorithmModel/CAN Pack","position",[1000,220,1250,300])
1 回の関数呼び出しで、CAN Pack ブロックに次のパラメータを設定します。
DataFormat
CANdbファイル
MsgList
set_param("AlgorithmModel/CAN Pack","DataFormat","CANdb specified signals","CANdbFile",db.Path,"MsgList","AlgOutput")
CAN Transmit ブロックの追加と設定
モデルに CAN Transmit ブロックを追加して配置します。
add_block("canlib/CAN Transmit","AlgorithmModel/CAN Transmit") set_param("AlgorithmModel/CAN Transmit","position",[1350,220,1550,300])
モデルが MathWorks 仮想 CAN デバイスを使用するように、「デバイス」パラメータを設定します。また、デフォルトのタイミングで定期送信が有効になります。
set_param("AlgorithmModel/CAN Transmit","Device","MathWorks Virtual 1 (Channel 1)") set_param("AlgorithmModel/CAN Transmit", "EnablePeriodicTransmit", "on")
ブロック間の接続を作成する
モデルに追加された CAN ブロックとアルゴリズム ブロックを接続する必要があります。すべての CAN ブロックのポート座標が必要です。
canRxPort = get_param("AlgorithmModel/CAN Receive","PortConnectivity"); canUnpackPort = get_param("AlgorithmModel/CAN Unpack","PortConnectivity"); subSystemPort = get_param("AlgorithmModel/Subsystem","PortConnectivity"); canPackPort = get_param("AlgorithmModel/CAN Pack","PortConnectivity"); canTxPort = get_param("AlgorithmModel/CAN Transmit","PortConnectivity"); terminatorPort = get_param("AlgorithmModel/Terminator","PortConnectivity"); [canRxPortFunc,canRxPortMsg] = canRxPort.Position; [canUnpackPortIn,canUnpackPortOut] = canUnpackPort.Position; [subSystemPortIn,subSystemPortOut] = subSystemPort.Position; [canPackPortIn,canPackPortOut] = canPackPort.Position; canTxPortMsg = canTxPort.Position; terminatorPortIn = terminatorPort.Position;
すべてのブロックを適切な順序で接続する線を追加します。
add_line("AlgorithmModel",[canRxPortMsg ; canUnpackPortIn]) add_line("AlgorithmModel",[canUnpackPortOut ; subSystemPortIn]) add_line("AlgorithmModel",[subSystemPortOut ; canPackPortIn]) add_line("AlgorithmModel",[canPackPortOut ; canTxPortMsg]) add_line("AlgorithmModel",[canRxPortFunc ; terminatorPortIn])
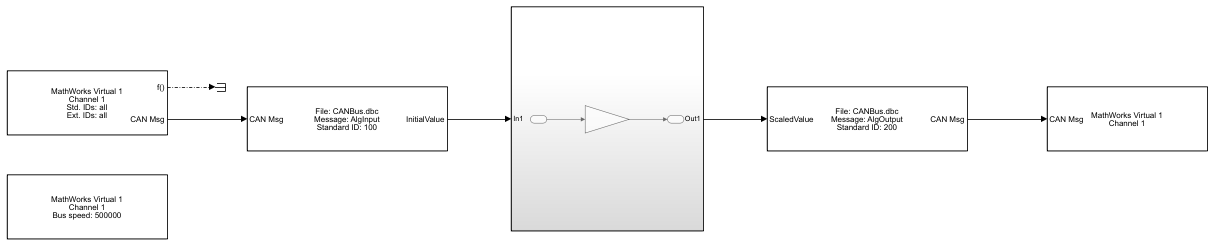
完成モデル
モデルの構築と構成後の外観は次のようになります。
構築したモデルをテストする
アルゴリズムモデルとの通信用にMATLABのCANチャネルを構成する
MathWorks 仮想 CAN デバイスのチャネル 2 を使用して、MATLAB ® に CAN チャネルを作成します。モデル内の CAN チャネルと通信します。また、CAN データベースを MATLAB チャネルに接続して、受信した CAN データを自動的に復号化するようにします。
canCh = canChannel("MathWorks","Virtual 1",2); canCh.Database = db;
MATLAB からモデルへの送信では、CAN データベースを使用して、アルゴリズムへの入力として CAN メッセージを準備します。
algInputMsg = canMessage(canCh.Database,"AlgInput");アルゴリズムモデルを実行する
シミュレーション時間を割り当ててシミュレーションを開始する
set_param("AlgorithmModel","StopTime","inf") set_param("AlgorithmModel","SimulationCommand","start")
シミュレーションが完全に開始されるまで一時停止します。
while strcmp(get_param("AlgorithmModel","SimulationStatus"),"stopped") end
MATLABコードを実行する
MATLAB CAN チャネルを開始します。
start(canCh);
モデルへの入力として、異なる信号データを持つ複数の CAN メッセージを送信します。
for value = 1:5 algInputMsg.Signals.InitialValue = value*value; transmit(canCh,algInputMsg) pause(1) end
バスからのすべてのメッセージを受信します。「AlgInput」および「AlgOutput」メッセージのインスタンス、それらのタイミング、および信号値に注意してください。
msg = receive(canCh,Inf,"OutputFormat","timetable")
msg=10×8 timetable
Time ID Extended Name Data Length Signals Error Remote
____________ ___ ________ _____________ ___________ ______ ____________ _____ ______
0.009728 sec 100 false {'AlgInput' } {[ 1]} 1 {1×1 struct} false false
0.15737 sec 200 false {'AlgOutput'} {1×2 uint8} 2 {1×1 struct} false false
1.0121 sec 100 false {'AlgInput' } {[ 4]} 1 {1×1 struct} false false
1.1574 sec 200 false {'AlgOutput'} {1×2 uint8} 2 {1×1 struct} false false
2.0146 sec 100 false {'AlgInput' } {[ 9]} 1 {1×1 struct} false false
2.1574 sec 200 false {'AlgOutput'} {1×2 uint8} 2 {1×1 struct} false false
3.0177 sec 100 false {'AlgInput' } {[ 16]} 1 {1×1 struct} false false
3.1574 sec 200 false {'AlgOutput'} {1×2 uint8} 2 {1×1 struct} false false
4.0219 sec 100 false {'AlgInput' } {[ 25]} 1 {1×1 struct} false false
4.1574 sec 200 false {'AlgOutput'} {1×2 uint8} 2 {1×1 struct} false false
canSignalTimetable 関数は、CAN メッセージの信号値をそれぞれ個別の timetable に分離して整理する効率的な方法を提供します。
signalTimeTable = canSignalTimetable(msg)
signalTimeTable = struct with fields:
AlgInput: [5×1 timetable]
AlgOutput: [5×1 timetable]
signalTimeTable.AlgInput
ans=5×1 timetable
Time InitialValue
____________ ____________
0.009728 sec 1
1.0121 sec 4
2.0146 sec 9
3.0177 sec 16
4.0219 sec 25
signalTimeTable.AlgOutput
ans=5×1 timetable
Time ScaledValue
___________ ___________
0.15737 sec 2
1.1574 sec 8
2.1574 sec 18
3.1574 sec 32
4.1574 sec 50
CAN チャネルを停止します。
stop(canCh)
アルゴリズムモデルを停止する
set_param("AlgorithmModel","SimulationCommand","stop")
信号データをプロットする
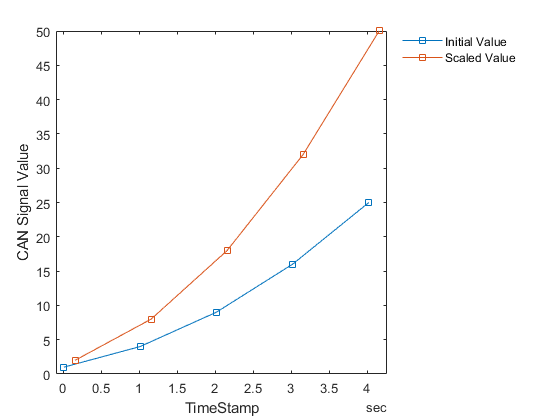
仮想バス上で発生したタイムスタンプに対して、CAN メッセージの初期信号値とスケーリングされた信号値をプロットします。MATLAB によって送信された値の変化と、モデルによって実行されたデータのスケーリングに注意してください。
plot(signalTimeTable.AlgInput.Time,signalTimeTable.AlgInput.InitialValue,"Marker","square","MarkerIndices",1:5) hold on plot(signalTimeTable.AlgOutput.Time,signalTimeTable.AlgOutput.ScaledValue,"Marker","square","MarkerIndices",1:5) hold off xlabel("TimeStamp"); ylabel("CAN Signal Value"); legend("Initial Value","Scaled Value","Location","northeastoutside"); legend("boxoff");