このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
CAN Unpack
CANメッセージから個々の信号をアンパックする

ライブラリ:
Vehicle Network Toolbox /
CAN Communication
C2000 Microcontroller Blockset /
Target Communication
Embedded Coder /
Embedded Targets /
Host Communication
Simulink Real-Time /
CAN /
CAN MSG blocks
説明
CAN Unpack ブロックは、指定された出力パラメータを使用して、各タイム ステップで CAN メッセージを信号データにアンパックします。データは個別の信号として出力されます。
このブロックを使用するには、Simulink® ソフトウェアのライセンスも必要です。
CAN Unpack ブロックは次をサポートします。
ヒント
チャネルを介して送信されるすべてのメッセージを処理するには、関数トリガー サブシステムで CAN Unpack ブロックを使用することをお勧めします。Triggered Subsystem の使用 (Simulink)を参照してください。
このブロックは、最大 8 バイトの J1939 パラメータ グループの信号を復号化するために使用できます。ただし、J1939 メッセージを使用する場合は、このブロックではなく、J1939 Communication ブロック ライブラリ内のブロックを使用することをお勧めします。 J1939通信 を参照してください。
例
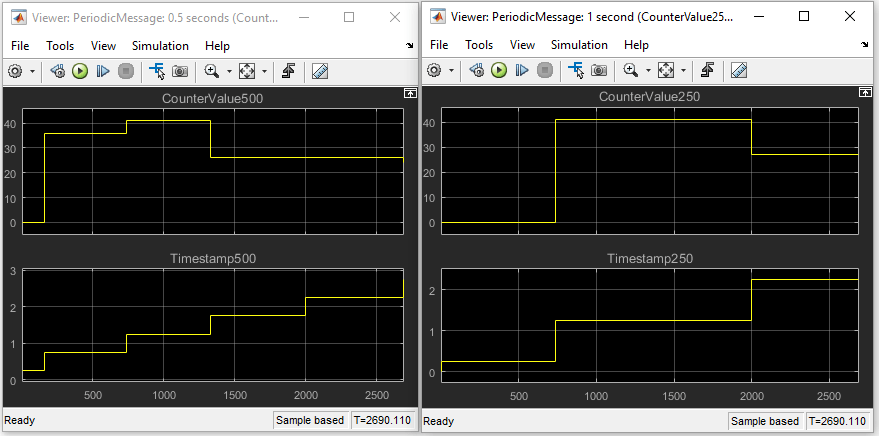
Simulinkにおける定期的なCANメッセージ送信動作
この例では、MathWorks ® 仮想 CAN チャネルを使用して、Simulink ® で CAN メッセージの定期的な送受信を設定する方法を示します。仮想チャネルはループバック構成で接続されます。

CAN メッセージのロギングと再生
この例では、Simulink ® の MathWorks ® 仮想 CAN チャネルを使用して CAN メッセージをログに記録および再生する方法を示します。このモデルを更新して、システムでサポートされているハードウェアに接続できます。
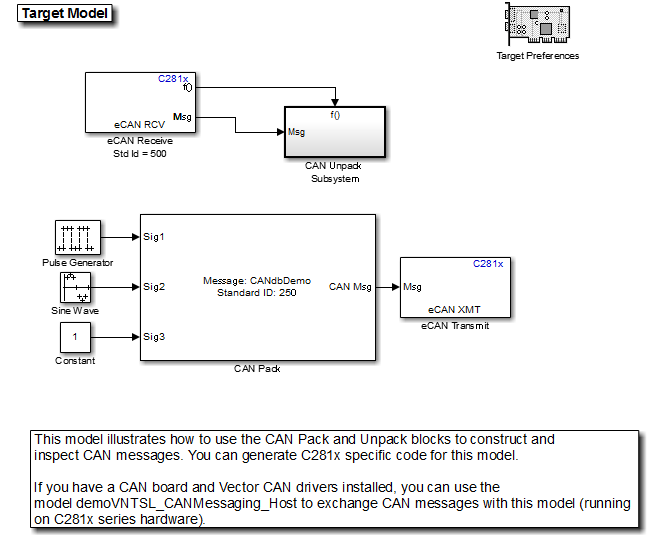
ホストモデルとターゲットモデル間の通信を設定する
この例では、ホスト側の CAN Vector ブロックとターゲット モデル間の CAN 通信を設定する方法を示します。この例では、次を使用します。
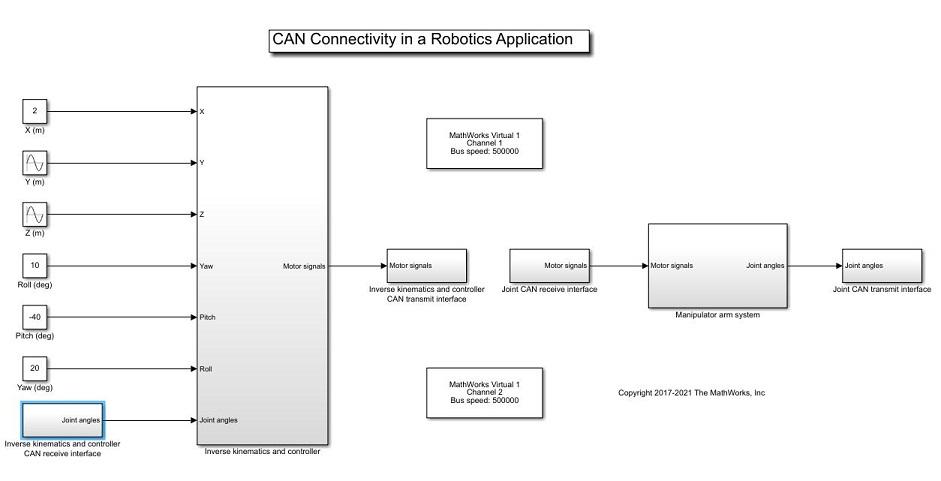
Simulink でロボットアーム用の CAN ネットワークを実装する
Vehicle Network Toolbox™ と Simulink を使用して、リモート マニピュレータ アームに Controller Area Network (CAN) を実装します。