このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
ホストモデルとターゲットモデル間の通信を設定する
この例では、ホスト側の CAN Vector ブロックとターゲット モデル間の CAN 通信を設定する方法を示します。この例では、次を使用します。
モデルを開いて実行するための CANcaseXL ハードウェアを備えた Embedded Coder ™ 製品。
ターゲット モデルを実行するための Spectrum Digital F28335 eZdsp™ ボード。
ホストモデルを使用した送受信
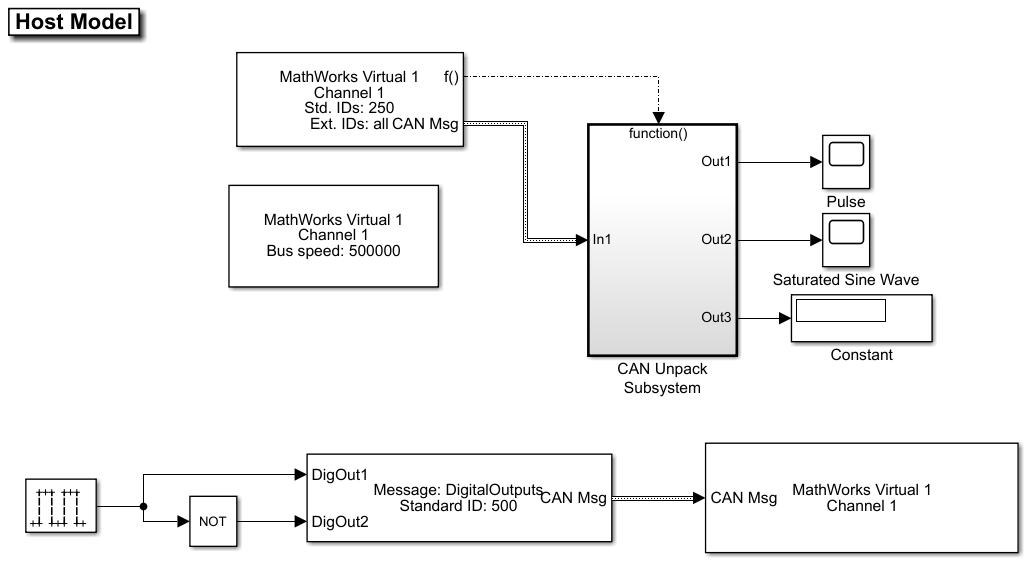
ホスト モデルは、Vector CANcaseXL ハードウェアのチャネル 1 を介して CAN メッセージを受信します。このモデルは、CAN バス経由で Vector ハードウェアのチャネル 1 を使用して CAN メッセージを送信します。
ターゲットモデルを使用した送受信
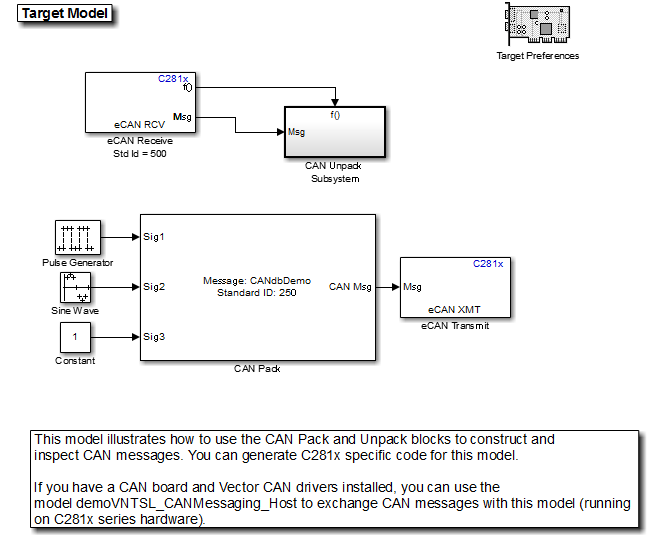
ターゲット モデルには、Vehicle Network Toolbox ™ の CAN Pack ブロックと Unpack ブロックを使用してパックおよびアンパックされた eCAN Receive ブロックと eCAN Transmit ブロックが含まれています。このモデルを正常に実行するには、ターゲット モデルの構成設定がホスト モデルの構成設定と一致している必要があります。ターゲット モデルが受信するメッセージは、ターゲット DSP ボード上の GPIO デジタル出力を制御します。
ホストモデルとターゲットモデル間の通信
ターゲット ハードウェア上でモデル demoVNTSL_CANMessaging_Target.slx を実行します。
ホスト側モデル demoVNTSL_CANMessaging_Host.slx を開きます。
CAN Configuration ブロックを使用して、システムにインストールされている Vector CAN ハードウェア上の CAN チャネルを構成します。
システム上でホスト通信モデルを実行します。
CAN メッセージは、システム上のホスト モデルとターゲット ハードウェア上で実行されているターゲット モデル間で送信されます。ホストは、Display ブロックとスコープを使用してそれらを受信し、アンパックして表示します。ホスト モデルによって送信されるメッセージは、ターゲット ハードウェア上の GPIO デジタル出力を制御します。
この例では、Vector CANcaseXL デバイスが使用されました。ただし、モデルを他のサポートされているハードウェアに接続することはできます。