このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
CAN Receive
指定されたCANデバイスからCANメッセージを受信する
ライブラリ:
Vehicle Network Toolbox /
CAN Communication
説明
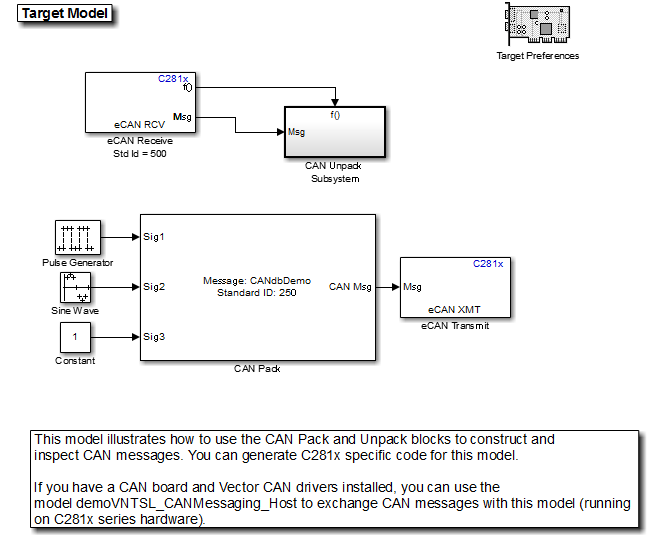
CAN Receive ブロックは CAN ネットワークからメッセージを受信し、それを Simulink® モデルに配信します。ブロック パラメータに応じて、各タイム ステップで 1 つのメッセージまたはすべてのメッセージを出力します。
メモ
このブロックを使用するには、Vehicle Network Toolbox™ と Simulink ソフトウェアの両方のライセンスが必要です。
CAN Receive ブロックは、CAN メッセージを先入れ先出し (FIFO) バッファに格納します。FIFO バッファは、タイムステップごとにキューの順序でメッセージをモデルに配信します。
メモ
同じ PEAK-System デバイス チャネルを使用するモデルでは、複数の CAN Receive ブロックを持つことはできません。
その他のサポートされている機能
CAN Receive ブロックは、Simulink アクセラレータ モードの使用をサポートします。この機能を使用すると、Simulink モデルの実行を高速化できます。この機能の詳細については、高速化 (Simulink) を参照してください。
CAN Receive ブロックは、必要なソース コードと依存する共有ライブラリをグループ化するために、packNGo 関数とともにコード生成の使用をサポートします。
コード生成
Vehicle Network Toolbox Simulink ブロックを使用するとコードを生成でき、これらのブロックを含むモデルをアクセラレータ モード、ラピッド アクセラレータ モード、外部モード、およびデプロイ モードで実行できるようになります。
Vehicle Network Toolbox、Simulink Coder™、および Embedded Coder® ソフトウェアを一緒に使用して、モデルの実装に使用できるコードをホスト側で生成できます。コード生成の詳細については、生成されたコードのコンパイル (Simulink Coder) を参照してください。
ブロックは移植性が制限されたコードを生成します。ブロックは、DLL などの事前コンパイルされた共有ライブラリを使用して、特定の種類のデバイスの I/O をサポートします。このブロックを使用すると、Simulink Coder でサポートされている packNGo 関数を使用して、モデルのビルド情報を設定および管理できます。packNGo (Simulink Coder) 関数を使用すると、モデル コードと依存する共有ライブラリを zip ファイルにパッケージ化して展開できます。ターゲット システムに MATLAB® がインストールされている必要はありませんが、ターゲット システムは MATLAB でサポートされている必要があります。
packNGo を設定するには:
set_param(gcs,'PostCodeGenCommand','packNGo(buildInfo)');
この例では、gcs は現在構築するモデルです。モデルをビルドすると、モデル名と同じ名前の zip ファイルが作成されます。この zip ファイルを別のマシンに移動し、そこで zip ファイル内のソース コードをビルドして、MATLAB および Simulink から独立して実行できる実行可能ファイルを作成できます。生成されたコードは C コンパイラと C++ コンパイラの両方でコンパイルされます。詳細については、コード コンパイルのカスタマイズ (Simulink Coder)を参照してください。
メモ
Linux® プラットフォームでは、ライブラリを解凍するフォルダーを環境変数 LD_LIBRARY_PATH に追加する必要があります。
例
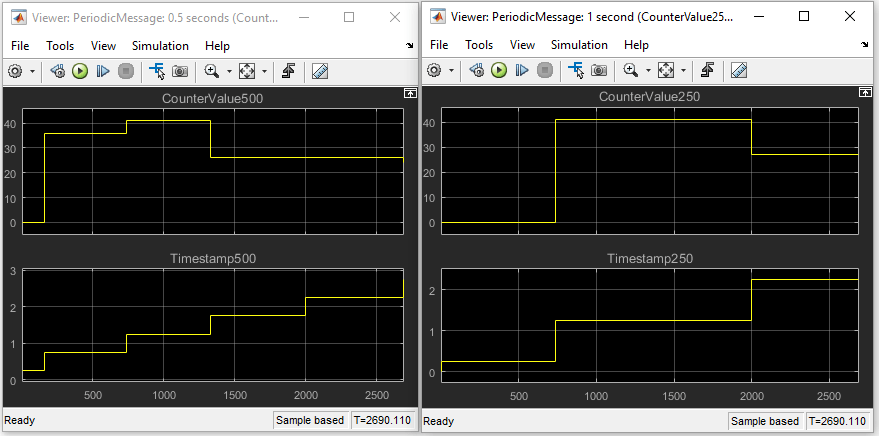
Simulinkにおける定期的なCANメッセージ送信動作
この例では、MathWorks ® 仮想 CAN チャネルを使用して、Simulink ® で CAN メッセージの定期的な送受信を設定する方法を示します。仮想チャネルはループバック構成で接続されます。
ホストモデルとターゲットモデル間の通信を設定する
この例では、ホスト側の CAN Vector ブロックとターゲット モデル間の CAN 通信を設定する方法を示します。この例では、次を使用します。

CAN メッセージのロギングと再生
この例では、Simulink ® の MathWorks ® 仮想 CAN チャネルを使用して CAN メッセージをログに記録および再生する方法を示します。このモデルを更新して、システムでサポートされているハードウェアに接続できます。
端子
出力
パラメーター
拡張機能
バージョン履歴
R2009a で導入