cameraIntrinsicsFromOpenCV
Description
intrinsics = cameraIntrinsicsFromOpenCV(intrinsicMatrix,distortionCoefficients,imageSize)intrinsics, which can be cameraIntrinsics or cameraIntrinsicsKB.
The OpenCV spatial coordinate system specifies the upper-left pixel center at
(0,0), whereas the MATLAB spatial coordinate system specifies the pixel center at
(1,1). The cameraIntrinsicsFromOpenCV function
compensates for this difference by adding 1 to both of the x and
y-values for the converted principal point.
Examples
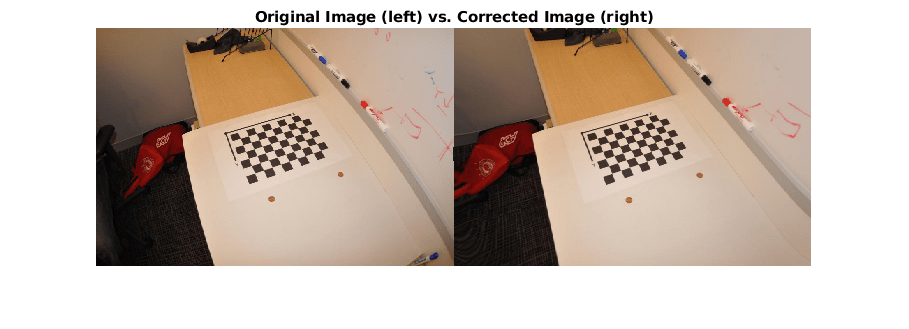
Define OpenCV camera intrinsic parameters in the workspace.
intrinsicMatrix = [729.4644 0 570.6455;
0 728.8196 346.0108;
0 0 1 ];
distortionCoefficients = [-0.4262 0.5460 0.0038 -0.0051 -0.6176];Define the image size returned by the camera.
imageSize = [712 1072];
Convert the intrinsic parameters from OpenCV to MATLAB format.
intrinsics = cameraIntrinsicsFromOpenCV(intrinsicMatrix, ...
distortionCoefficients,imageSize);Load the image to undistort.
filename = fullfile(toolboxdir("vision"),"visiondata","calibration", ... "mono","image01.jpg"); I = imread(filename);
Undistort the image and display the results.
J = undistortImage(I,intrinsics); imshowpair(I,J,"montage"); title("Original Image (left) vs. Corrected Image (right)");
Define OpenCV fisheye parameters in the workspace.
intrinsicMatrix = [875.88 0.00 1005.62; ... 0.00 874.76 741.52; ... 0.00, 0.00, 1.00]; distortionCoeffs = [0.08, -0.16, 0.35, -0.26];
Define the image size returned by the camera.
imageSize =[1500 2000];
Import the intrinsic camera parameters for a fisheye lens from OpenCV.
intrinsicsKB = cameraIntrinsicsFromOpenCV(intrinsicMatrix,distortionCoeffs,imageSize)
intrinsicsKB =
cameraIntrinsicsKB with properties:
FocalLength: [875.8800 874.7600]
PrincipalPoint: [1.0066e+03 742.5200]
ImageSize: [1500 2000]
DistortionCoefficients: [0.0800 -0.1600 0.3500 -0.2600]
K: [3×3 double]
Load an image to undistort.
filename = fullfile(toolboxdir("vision"),"visiondata", ... "calibration","gopro","gopro01.jpg"); I = imread(filename);
Undistort the image and display the results.
J = undistortImage(I,intrinsicsKB); imshowpair(I,J,"montage"); title("Original Image (left) vs. Corrected Image (right)");

The ROS camera calibration package estimates camera intrinsic parameters using the OpenCV camera calibration tools [1]. After calibrating a camera in ROS, you can import its intrinsic parameters to a YAML file using the camera calibration parser in ROS. To use the calibrated camera with Computer Vision Toolbox™ functions, such as undistortImage, you must read the camera parameters from the YAML file and then convert them into a cameraIntrinsics object using cameraIntrinsicsFromOpenCV.
Note: The cameraIntrinsicsFromOpenCV function supports importing camera intrinsic parameters for only those pinhole camera models that use the ROS plumb-bob distortion model.
Read Camera Intrinsic Parameters from a ROS YAML File
Read the camera parameters stored in cameraParams.yaml using the helper function helperReadYAML.
intrinsicsParams = helperReadYAML("cameraParams.yaml");Create cameraIntrinsics Object Using cameraIntrinsicsFromOpenCV
Use the cameraIntrinsicsFromOpenCV function to create a cameraIntrinsics object from the camera matrix and the distortion coefficients.
imageSize = [intrinsicsParams.image_height intrinsicsParams.image_width]; intrinsicMatrix = intrinsicsParams.camera_matrix; distortionCoefficients = intrinsicsParams.distortion_coefficients; intrinsicsObj = cameraIntrinsicsFromOpenCV(intrinsicMatrix,distortionCoefficients,imageSize);
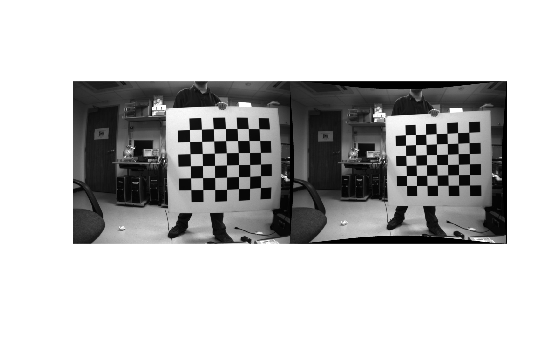
Undistort Image
Use the imported camera intrinsics with undistortImage to undistort an image captured using the calibrated camera.
% Load the captured image. imageName = fullfile(toolboxdir("vision"),"visiondata","calibration","stereo","left","left01.png"); I = imread(imageName); % Undistort the image. J = undistortImage(I,intrinsicsObj,OutputView="full"); % Display the result. figure montage({I,J})
Supporting Functions
helperReadYAML
The helperReadYAML function reads the monocular camera parameters from the input YAML file that was exported from ROS.
function cameraParams = helperReadYAML(filename) % helperReadYAML reads a ROS YAML file, filename, and returns a structure % with these fields: image_width, image_height, camera_name, % camera_matrix, distortion_model, distortion_coefficients, % rectification_matrix, and projection_matrix. These fields are stored % in the YAML file colon separated from their values in different lines. f = fopen(filename,'r'); stringFields = {'camera_name','distortion_model'}; while ~feof(f) [name,value,isEmptyLine] = helperReadYAMLLine(f); if isEmptyLine continue end if ~isempty(value) % Convert all values to numbers except for known string % fields. if ~any(contains(name, stringFields)) value = str2num(value); %#ok end else % An empty value in ROS YAML files indicates a matrix in % upcoming lines. Read the matrix from the upcoming lines. value = helperReadYAMLMatrix(f); end % Store post-processed value. cameraParams.(name) = value; end fclose(f); end
helperReadYAMLMatrix
The helperReadYAMLMatrix function reads the rows, columns and data fields of a matrix in the ROS YAML file.
function matrix = helperReadYAMLMatrix(f) % helperReadYAMLMatrix reads a matrix from the ROS YAML file. A matrix in % a ROS YAML file has three fields: rows, columns and data. rows and col % describe the matrix size. data is a contiguous array of the matrix % elements in row-major order. This helper function assumes the presence % of all three fields of a matrix to return the correct matrix. numRows = 0; numCols = 0; data = []; % Read numRows, numCols and matrix data. while ~feof(f) [name,value,isEmptyLine] = helperReadYAMLLine(f); if isEmptyLine continue end switch name case 'rows' numRows = str2num(value); %#ok case 'cols' numCols = str2num(value); %#ok case 'data' data = str2num(value); %#ok % Terminate the while loop as data is the last % field of a matrix in the ROS YAML file. break otherwise % Terminate the while loop if any other field is % encountered. break end end if numel(data) == numRows*numCols % Reshape the matrix using row-major order. matrix = reshape(data,[numCols numRows])'; end end
helperReadYAMLLine
The helperReadYAMLLine function reads a line of a ROS YAML file.
function [name,value,isEmptyLine] = helperReadYAMLLine(f) % Read line from file. line = fgetl(f); % Trim leading and trailing white spaces. line = strtrim(line); if isempty(line) || line(1)=='#' % Empty line or comment. name = ''; value = ''; isEmptyLine = true; else % Split the line to get name and value. c = strsplit(line,':'); assert(length(c)==2,'Unexpected file format') name = c{1}; value = strtrim(c{2}); % Trim leading white space. isEmptyLine = false; end end
References
Input Arguments
Output Arguments
References
[1] Juho Kannala and Sami Brandt. A generic camera model and calibration method for conventional, wide-angle, and fish-eye lenses. IEEE transactions on pattern analysis and machine intelligence, 28:1335–40, 09 2006.