モーターおよびサーボへのアクチュエータの値の書き込み
モーターの電子速度コントローラーおよびサーボにアクチュエータの値を書き込む方法を学習する
PWM インターフェイスまたは UAVCAN/DroneCAN インターフェイス経由で接続されたモーターの電子速度コントローラー (ESC) およびサーボにアクチュエータの値を書き込む方法を学習します。
ブロック
| PX4 Actuator Write | Set actuator values for motors and servos (R2024b 以降) |
| PX4 Write Thrust & Torque Setpoint | Publish the thrust and torque setpoints to uORB topics (R2025a 以降) |
| PX4 PWM Output | Configure PWM outputs for servo motors and ESC control |
トピック
- Convert PX4 PWM Output Block to PX4 Actuator Write Block
Converting PWM blocks to PX4 Actuator Write block in a Simulink® model.
- Configure and Assign Actuators in QGC
Configure PWM & AUX pins in QGC.
- Generate PWM Signals with PX4 PWM Output Block
Use the UAV Toolbox Support Package for PX4® Autopilots to generate PWM signal from a PX4 autopilot in Simulink.
注目の例

Actuator Control Using Write Thrust & Torque Blocks for PX4 Autopilots
Use the PX4 Write Thrust & Torque block to command the actuators.
Getting Started with Actuator Control over PWM
Use the PX4 Actuator Write block to write actuator values over PWM.
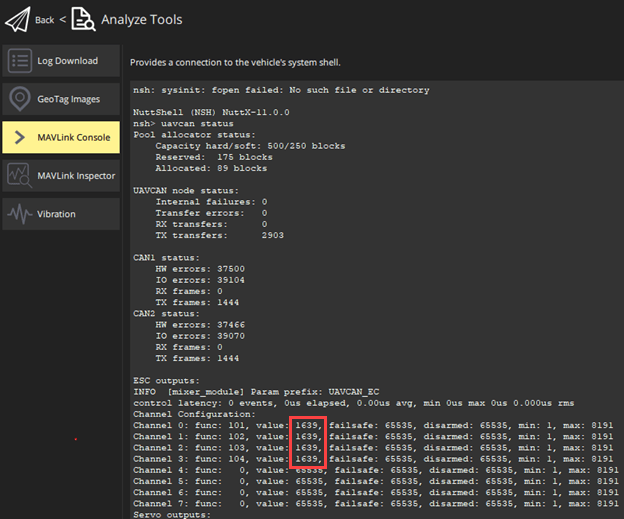
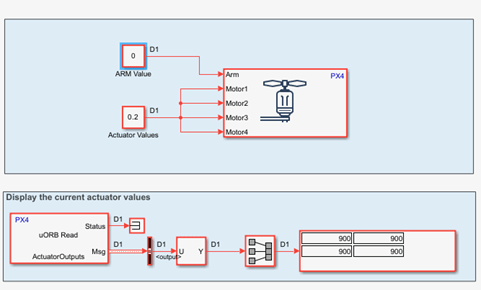
Getting Started with Actuator Control over UAVCAN/DroneCAN
Use the PX4 Actuator Write block to write actuator values over UAVCAN/DroneCAN interface.