PID コントローラーに対する制約の適用
以下の例では、Constraint Enforcement ブロックを使用して、既知の制約を PID 制御アプリケーションに適用する方法を説明します。
概要
この例では、プラント ダイナミクスは次の方程式 [1] で記述されます。
プラントの目標は、次のように定義された望ましい軌跡を追従することです。
同じ PID 制御アプリケーションに対して、既知の制約関数を学習し、適用する例については、PID コントローラーの制約の学習と適用を参照してください。
モデル パラメーターと初期条件を設定します。
r = 1.5; % Radius for desired trajectory Ts = 0.1; % Sample time Tf = 22; % Duration x0_1 = -r; % Initial condition for x1 x0_2 = 0; % Initial condition for x2
PID コントローラーの設計
制約を適用する前に、基準軌跡を追従するための PID コントローラーを設計します。trackingWithPIDs モデルには、PID 調整器アプリを使用して調整されたゲインをもつ 2 つの PID コントローラーが含まれています。Simulink® モデルにおける PID コントローラーの調整の詳細については、Simulink でのモデルベースの PID 調整の紹介を参照してください。
mdl = "trackingWithPIDs";
open_system(mdl)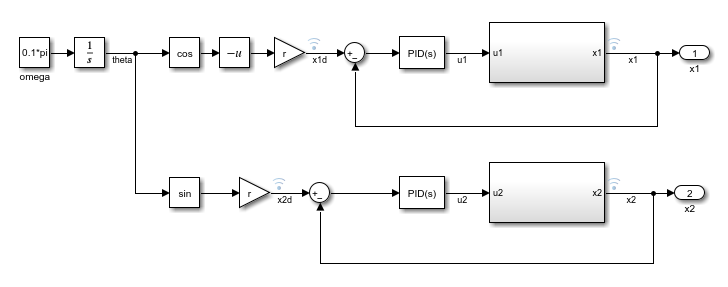
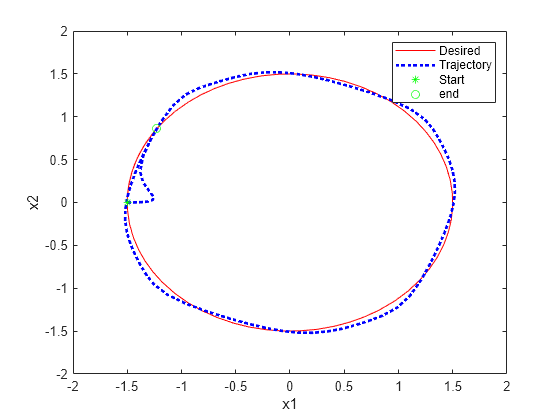
PID コントローラーをシミュレートし、追従性能をプロットします。
% Simulate the model. out = sim(mdl); % Extract trajectories. logData = out.logsout; x1_traj = logData{3}.Values.Data; x2_traj = logData{4}.Values.Data; x1_des = logData{1}.Values.Data; x2_des = logData{2}.Values.Data; % Plot trajectories. figure(Name="Tracking") xlim([-2,2]) ylim([-2,2]) plot(x1_des,x2_des,"r") xlabel("x1") ylabel("x2") hold on plot(x1_traj,x2_traj,"b:",LineWidth=2) hold on plot(x1_traj(1),x2_traj(1),"g*") hold on plot(x1_traj(end),x2_traj(end),"go") legend("Desired","Trajectory","Start","end",Location="best")
制約関数
この例では、Constraint Enforcement ブロックを使用して、既知の制約をアプリケーションに適用します。このブロックは、制約関数を満たすように制御動作を調整します。
この例では、プラントの実行可能領域は、 で与えられます。したがって、プラントの次状態の条件 は を満たさなければなりません。
プラント ダイナミクスを次の方程式で近似できます。
制約をこの方程式に適用すると、以下の制約関数が生成されます。
Constraint Enforcement ブロックは、形式 の制約を受け入れます。このアプリケーションの場合、この制約関数の係数は以下のとおりです。
Constraint Enforcement を使用した PID コントローラーのシミュレーション
trackingWithConstraintPID モデルには、PID コントローラー、プラント ダイナミクス、および制約の実装が含まれています。
mdl = "trackingWithKnownConstraintPID";
open_system(mdl)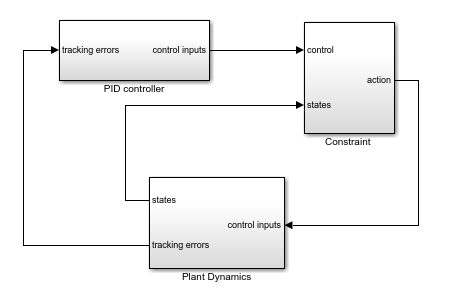
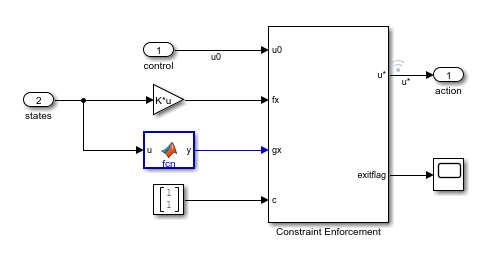
制約の実装を表示するには、Constraint サブシステムを開きます。ここで、モデルは MATLAB Function ブロックを使用して既知の制約関数を実装しており、Constraint Enforcement ブロックにより制約関数が適用されます。
モデルを実行し、シミュレーション結果をプロットします。このプロットから、プラントの状態が 1 より小さいことがわかります。
% Simulate the model. out = sim(mdl); % Extract trajectories. logData = out.logsout; x1_traj = zeros(size(out.tout)); x2_traj = zeros(size(out.tout)); for ct = 1:size(out.tout,1) x1_traj(ct) = logData{4}.Values.Data(:,:,ct); x2_traj(ct) = logData{5}.Values.Data(:,:,ct); end x1_des = logData{2}.Values.Data; x2_des = logData{3}.Values.Data; % Plot trajectories. figure(Name="Tracking with Constraint"); plot(x1_des,x2_des,"r") xlabel("x1") ylabel("x2") hold on plot(x1_traj,x2_traj,"b:",LineWidth=2) hold on plot(x1_traj(1),x2_traj(1),"g*") hold on plot(x1_traj(end),x2_traj(end),"go") legend("Desired","Trajectory","Start","End",Location="best")

Constraint Enforcement ブロックによって、プラントが 1 より小さい状態を維持するように、正常に制御動作が制約されています。
参考文献
[1] Robey, Alexander, Haimin Hu, Lars Lindemann, Hanwen Zhang, Dimos V. Dimarogonas, Stephen Tu, and Nikolai Matni. "Learning Control Barrier Functions from Expert Demonstrations." Preprint, submitted April 7, 2020. https://arxiv.org/abs/2004.03315