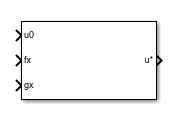
Constraint Enforcement
制御動作を変更し、制約およびアクション範囲を満たす
ライブラリ:
Simulink Control Design /
Constraint Control
説明
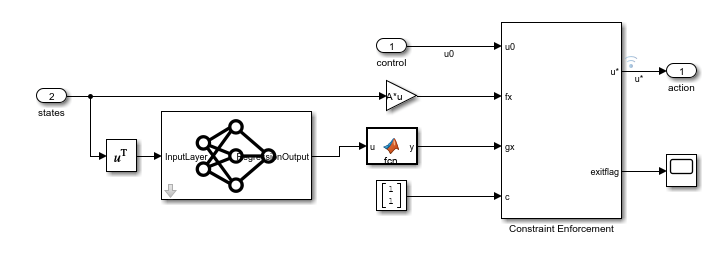
Constraint Enforcement ブロックは、制約とアクション範囲に従って、指定された制御動作の最も近くにある変更された制御動作を計算します。
このブロックは、二次計画法 (QP) ソルバーを使用して、関数 を最小化する制御動作 u を検出します。ここで、u0 は変更されていない制御動作です。
ソルバーは、以下の制約を最適化問題に適用します。
ここで、以下となります。
fx および gx は制約関数の係数。
c は制約関数の範囲。
umin は制御動作の下限。
umax は制御動作の上限。
Constraint Enforcement ブロックには、Optimization Toolbox™ ソフトウェアが必要です。
制約の適用の詳細については、制御設計への制約の適用を参照してください。
例

制約の適用を使用した強化学習エージェントの学習
Constraint Enforcement ブロックを使用してアクションを制約して強化学習エージェントに学習させる。

PID コントローラーに対する制約の適用
Constraint Enforcement ブロックを使用して、既知の制約関数を PID 制御アプリケーションに適用します。
PID コントローラーの制約の学習と適用
Constraint Enforcement ブロックを使用して PID 制御アプリケーションの不明な制約関数を学習させて適用する。

制約の適用を使用したアダプティブ クルーズ コントロール用の RL エージェントの学習
速度と車間距離についての制約を適用してアダプティブ クルーズ コントロール用の強化学習エージェントに学習させる。
端子
入力
出力
パラメーター
[パラメーター] タブ
適用する制約の数を指定します。
プログラムでの使用
ブロック パラメーター: nc |
| タイプ: 文字ベクトル |
既定: '1' |
範囲を適用し、最適化するアクションの数を指定します。
プログラムでの使用
ブロック パラメーター: nu |
| タイプ: 文字ベクトル |
既定: '1' |
制約の定数境界を指定します。[制約数] パラメーターが 1 の場合、[制約範囲] を有限のスカラーとして指定します。そうでない場合、[制約範囲] を [制約数] と等しい長さの有限値のベクトルとして指定します。
制約が実行時に変化する場合、[外部ソースの使用] パラメーターを選択し、実行時の制約信号を c 入力端子に接続します。
依存関係
このパラメーターを有効にするには、[外部ソースの使用] パラメーターをオフにします。
プログラムでの使用
ブロック パラメーター: c |
| タイプ: 文字ベクトル |
既定: '0' |
このパラメーターを選択して、外部制約範囲の c 入力端子を追加します。
プログラムでの使用
ブロック パラメーター: external_c |
| タイプ: 文字ベクトル |
値: 'off' | 'on' |
既定: 'off' |
このパラメーターを選択して、アクションの外部上限の umax 入力端子を追加します。
プログラムでの使用
ブロック パラメーター: external_umax |
| タイプ: 文字ベクトル |
値: 'off' | 'on' |
既定: 'off' |
このパラメーターを選択して、アクションの外部下限の umin 入力端子を追加します。
プログラムでの使用
ブロック パラメーター: external_umin |
| タイプ: 文字ベクトル |
値: 'off' | 'on' |
既定: 'off' |
[ブロック] タブ
出力データ型を指定します。
"データ型アシスタント" は、データ属性の設定に役立ちます。"データ型アシスタント" を使用するには、 をクリックします。
をクリックします。
次のデータ型を指定できます。
組み込み—[single]または[double]データ型。式— 型を指定する MATLAB 式を使用。
詳細については、データ型アシスタントを利用したデータ型の指定を参照してください。
最適化を実行するサンプル時間を指定します。
プログラムでの使用
ブロック パラメーター: Ts |
| タイプ: 文字ベクトル |
既定: '0.1' |
最適化を反復する最大回数を指定します。
プログラムでの使用
ブロック パラメーター: maxiter |
| タイプ: 文字ベクトル |
既定: '200' |
制約違反の許容誤差の値を指定します。
プログラムでの使用
ブロック パラメーター: tol |
| タイプ: 文字ベクトル |
既定: '1e-6' |
このパラメーターを選択して、QP ソルバーの最適化ステータスに対する [exitflag] 出力端子を追加します。
プログラムでの使用
ブロック パラメーター: exitflag |
| タイプ: 文字ベクトル |
値: 'off' | 'on' |
既定: 'off' |
このパラメーターを選択すると、最初の QP 問題が実行不可能な場合、制約を無効化して最適化が再実行されます。
このパラメーターと [QP が実行不可能な場合はアクション範囲を無視] の両方を選択すると、最初の QP 問題が実行不可能な場合、変更されていないアクション信号が出力されます。
プログラムでの使用
ブロック パラメーター: relax_c |
| タイプ: 文字ベクトル |
値: 'off' | 'on' |
既定: 'off' |
このパラメーターを選択すると、最初の QP 問題が実行不可能な場合、アクション範囲を無効化して最適化が再実行されます。umax と umin の両方の入力端子が無効になっている場合、ブロックはこのパラメーターを無視します。
このパラメーターと [QP が実行不可能な場合は制約を無視] の両方を選択すると、最初の QP 問題が実行不可能な場合、変更されていないアクション信号が出力されます。
プログラムでの使用
ブロック パラメーター: relax_u |
| タイプ: 文字ベクトル |
値: 'off' | 'on' |
既定: 'off' |