リアルタイムの PID 自動調整
PID 自動調整では、PID コントローラーをリアルタイムで物理プラントに対して調整することができます。Simulink® Coder™ のようなコード生成製品がある場合、ハードウェアに調整アルゴリズムを実装するコードを生成して、ループ内で Simulink の有無にかかわらず調整を行うことが可能です。はじめに、PID 自動調整の機能を参照してください。
ブロック
トピック
PID 自動調整の基礎
- PID 自動調整を使用する場合
PID 自動調整では、パラメトリックなプラント モデルや初期のコントローラー設計なしで PID コントローラーを調整できます。アルゴリズムを展開し、コントローラーを物理プラントに対してリアルタイムで調整します。 - PID 自動調整の機能
PID 自動調整を使用するには、PID 自動調整器ブロックを構成して展開する。ブロックはプラントにテスト信号を挿入し、推定した周波数応答に基づいて PID ゲインを調整します。 - Simulink でモデル化されたプラントの PID 自動調整
PID 自動調整アルゴリズムを使用して、モデルの実行中に Simulink でモデル化されたプラントに対して調整を行う。 - リアルタイムの PID 自動調整
PID 自動調整アルゴリズムを物理システムに対するリアルタイム調整のためのスタンドアロン アプリケーションとして展開する。 - Simulink でのリアルタイムの PID 自動調整の制御
Simulink で調整プロセスを制御しながら物理プラントに対して PID アルゴリズムを実行する。 - Closed-Loop PID Autotuner ブロックを使用した PID コントローラーのリアルタイム調整
プラント入力に正弦波摂動信号を挿入して閉ループ実験中にプラント出力を測定することにより、単一ループの PID コントローラーをリアルタイムで調整する。 - Open-Loop PID Autotuner ブロックを使用した PID コントローラーのリアルタイム調整
プラント入力に正弦波摂動信号を挿入して開ループ実験中にプラント出力を測定することにより、単一ループの PID コントローラーをリアルタイムで調整する。
モーター制御分野への適用
- カスケード PI コントローラーを使用した BLDC モーターの速度制御
Closed-Loop PID Autotuner ブロックを使用してカスケード構成で 2 つの PI コントローラーを調整する。 - Closed-Loop PID Autotuner ブロックを使用したベクトル制御コントローラーの調整
1 回のシミュレーションで永久磁石同期機のベクトル制御コントローラーを調整する。 - Closed-Loop PID Autotuner ブロックを使用した非同期機のベクトル制御コントローラーの調整
1 回のシミュレーションで非同期機のベクトル制御コントローラーを調整する。 - Closed-Loop PID Autotuner ブロックを使用した PMSM のベクトル制御コントローラーの調整
1 回のシミュレーションで PMSM ベースの電気牽引駆動装置のベクトル制御コントローラーを調整する。 - Closed-Loop PID Autotuner ブロックを使用した PMSM モデルのゲイン スケジュール コントローラーの調整
Closed-Loop PID Autotuner ブロックを使用して PMSM モデルのゲイン スケジュール PI コントローラーを 1 回のシミュレーションで調整する。 - Gain-Scheduled PID Autotuning Torque Control for a Nonlinear PMSM
Tune gain-scheduled PID controllers for d-axis and q-axis current loops of a nonlinear PMSM model. (R2024a 以降) - Tune PI Controllers Using Field Oriented Control Autotuner (Motor Control Blockset)
This example computes the gain values of PI controllers available in the speed and current control loops by using the Field Oriented Control Autotuner block. - Tune PI Controllers Using Field Oriented Control Autotuner Block on Real-Time Systems (Motor Control Blockset)
Compute the gain values of PI controllers within the speed and current controllers by using the Field Oriented Control Autotuner block. - Tune PI Controllers (in Field-Weakening Control Mode) Using FOC Autotuner Block (Motor Control Blockset)
This example uses the Field Oriented Control Autotuner block to compute the gain values of the PI controllers available in the speed, current, and flux control loops of a field-weakening control algorithm.
注目の例

Closed-Loop PID Autotuner ブロックを使用した三相整流器の PID コントローラーの設計
Closed-Loop PID Autotuner ブロックを使用して Vienna 整流器ベースの力率修正器のコントローラーを調整する。
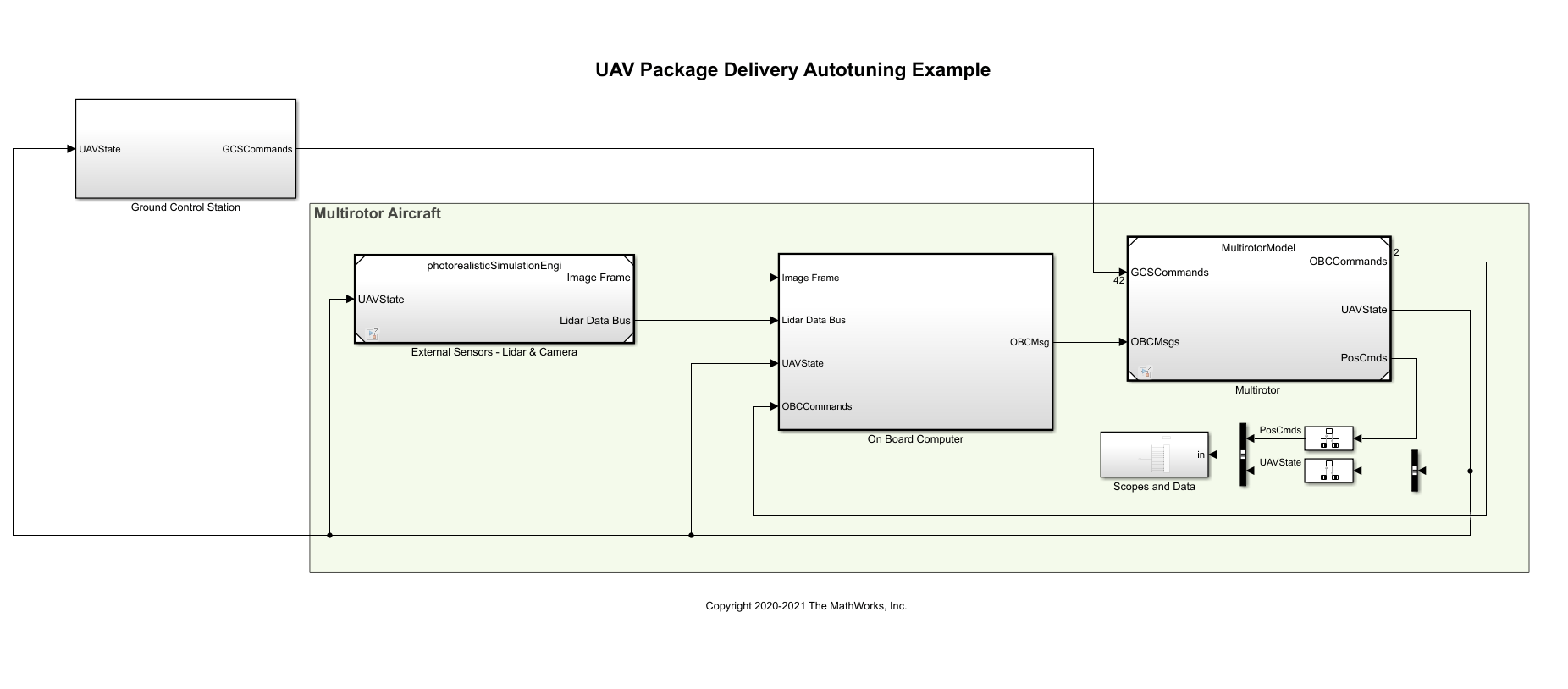
UAV クワッドコプターの PID 自動調整
UAV クワッドコプターの姿勢と位置のコントローラーを 1 回のシミュレーションで調整する。

Closed-Loop PID Autotuner ブロックを使用したゲイン スケジュール コントローラーの調整
Closed-Loop PID Autotuner ブロックを使用して水タンク モデルのゲイン スケジュール PID コントローラーを 1 回のシミュレーションで調整する。
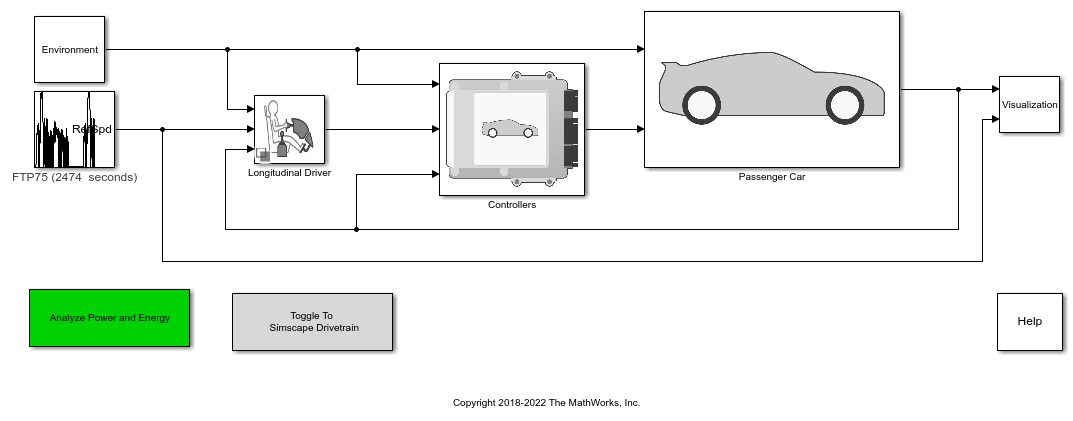
Driver Calibration using the Closed-Loop PID Autotuner
Automatically tune PID controller for a hybrid electric vehicle using Closed-Loop PID Autotuner.

Gain-Scheduled PID Autotuning a VTOL UAV During Forward and Backward Transition
Tune gain-scheduled PID controller for VTOL UAV transitioning between operating modes.

Disable PID Autotuning in Presence of Downstream Signal Limiting
Disable the frequency response estimation process and prevent the PID gains from updating when the system encounters limitations.
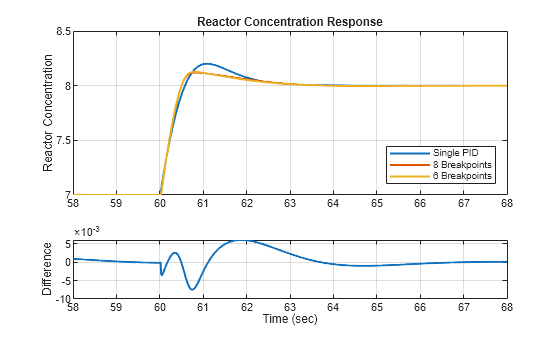
Use Visualization Plots to Refine Number of Breakpoints in Gain-Scheduled PID Autotuner
Automatically tune and validate a gain-scheduled controller for a chemical reactor using Gain-Scheduled PID Autotuner.