Closed-Loop PID Autotuner ブロックを使用したベクトル制御コントローラーの調整
この例では、Closed-Loop PID Autotuner ブロックを使用して 1 回のシミュレーションのみで永久磁石同期機 (PMSM) のベクトル制御 (FOC) を調整する方法を説明します。
ベクトル制御の紹介
この例では、永久磁石同期機 (PMSM) のベクトル制御 (FOC) を、Simscape™ Electrical™ コンポーネントを使用して Simulink® でモデル化します。
mdl = 'scdfocmotorPIDTuning';
open_system(mdl)
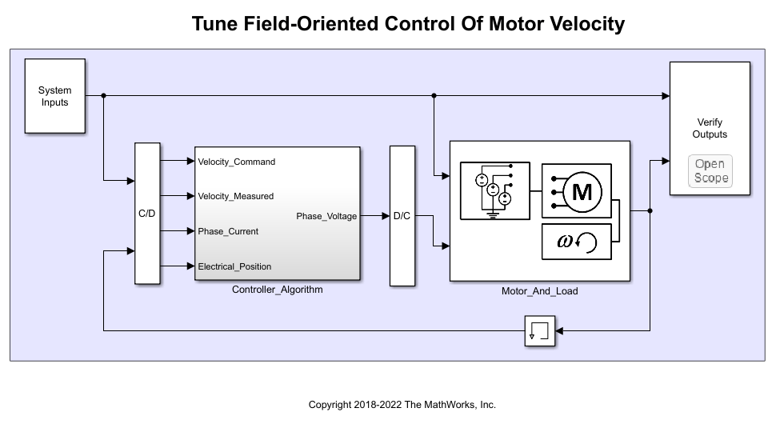
ベクトル制御 (FOC) は三相固定子電流をベクトルとして制御します。FOC は、時間および速度に依存する三相システムを 2 つの時不変座標系に変換する投影に基づいています。これらの変換は、Clarke 変換、Park 変換、およびそのそれぞれの逆変換です。これらの変換は Controller_Algorithm サブシステム内のブロックとして実装されます。

AC モーターの制御に FOC を使用する利点には次が含まれます。
トルクと磁束を個別に直接制御
過渡状態および定常状態を正確に管理
DC モーターと比べて同様の性能
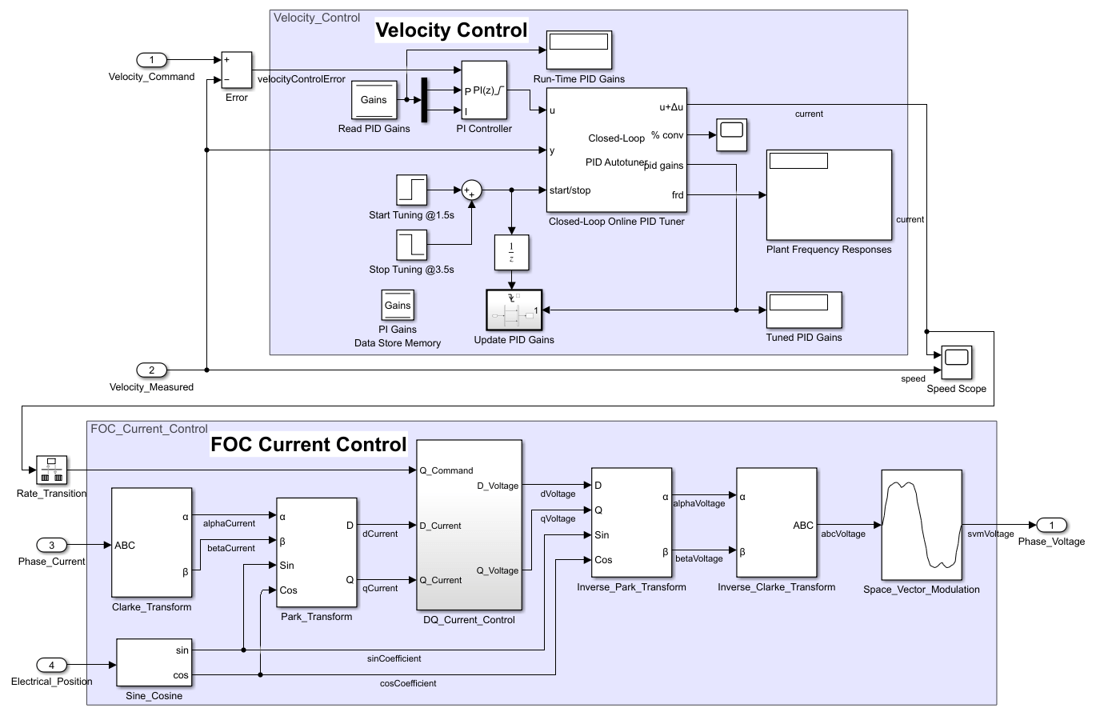
Controller_Algorithm サブシステムは 3 つすべての PI コントローラーを含みます。外側のループの PI コントローラーはモーターの速度を調整します。内側のループの PI コントローラー 2 つは d 軸と q 軸の電流を個別に制御します。外側のループの PI コントローラーからのコマンドは、q 軸に直接送られてトルクを制御します。このタイプの AC モーターでは回転子の磁束が永久磁石で固定されているため、d 軸のコマンドは PMSM ではゼロになります。
既存の速度の PI コントローラーのゲインは P = 0.08655 および I = 0.1997 です。電流の PI コントローラーのゲインはどちらも P = 1 および I = 200 です。
コントローラー ゲインは Data Store Memory ブロックに格納されており、外部から各 PID ブロックへ提供されます。コントローラーの調整プロセスが完了すると、新規の調整ゲインが Data Store Memory ブロックに書き込まれます。この構成ではシミュレーション中にコントローラー ゲインをリアルタイムで更新することが可能です。
Closed-Loop PID Autotuner ブロック
Closed-Loop PID Autotuner ブロックでは、一度に 1 つの PID コントローラーを調整することができます。このブロックは閉ループ実験の実行中に正弦波摂動信号をプラント入力に挿入し、プラント出力を測定します。実験が停止されると、ブロックは目的の帯域幅付近の少数の点で推定したプラントの周波数応答に基づく PID ゲインを計算します。この FOC PMSM モデルでは、3 つの PI コントローラーそれぞれに Closed-Loop PID Autotuner ブロックを使用できます。
このワークフローは、Closed-Loop PID Autotuner ブロックを使って再調整する初期コントローラーがある場合に適用されます。この方法の利点は次のとおりです。
実験中に予期しない外乱が生じた場合、既存のコントローラーによりこれが抑制され、安全な操作が確保されます。
既存のコントローラーは、摂動信号を抑制することによってプラントを定格操作点付近で実行し続けます。
シミュレーションとリアルタイム アプリケーションの両方に Closed-Loop PID Autotuner ブロックを使用する場合、次に注意します。
プラントは漸近的に安定 (つまりすべての極が厳密に安定) であるか、積分でなければなりません。自動調整器ブロックは不安定なプラントでは動作しません。
既存のコントローラーのフィードバック ループは安定でなければなりません。
プラントの周波数応答をリアルタイムでより正確に推定するには、実験中に FOC PMSM モデル内のすべての外乱の発生を最小限にします。自動調整器ブロックは、プラント出力が挿入された摂動信号のみへの応答であると仮定します。
実験中はフィードバック ループが閉じているため、既存のコントローラーは挿入された摂動信号も抑制します。閉ループ実験を使用する利点は、コントローラーによってプラントが定格操作点付近で実行され、安全な操作を維持できることです。欠点は、ターゲット帯域幅が現在の帯域幅からかけ離れていると、周波数応答の推定の精度が低下することです。
自動調整器とプラントおよびコントローラーの接続
FOC PMSM モデルに示されるように、3 つすべての PI コントローラーについて PID ブロックとプラントの間に Closed-Loop PID Autotuner ブロックを挿入します。start/stop 信号によって閉ループ実験が開始および終了します。実験が実行されていない場合、Closed-Loop PID Autotuner ブロックは 1 のゲインのブロックのように動作し、 信号が
信号が  に直接渡されます。
に直接渡されます。
変更された外側のループの制御構造を見るには、Controller_Algorithm サブシステムを開きます。
controlSubsystem = [mdl '/Controller_Algorithm'];
open_system(controlSubsystem)
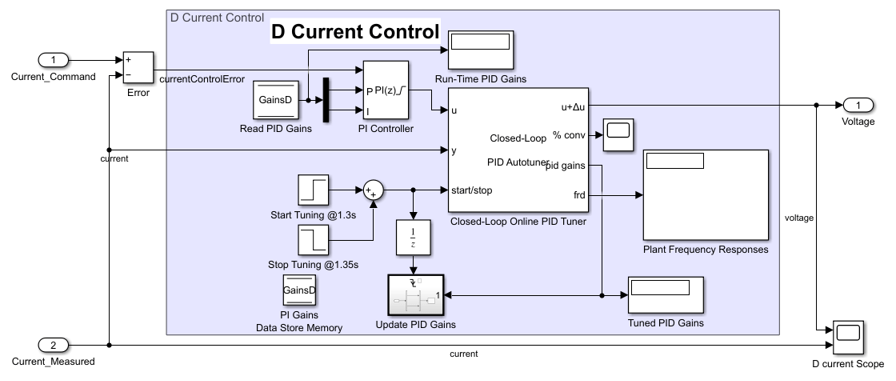
変更された d 軸電流コントローラーを表示します。変更された q 軸コントローラーは同一の構造をもちます。
open_system([controlSubsystem '/DQ_Current_Control/D_Current_Control'])
自動調整器ブロックの設定
Closed-Loop PID Autotuner ブロックをプラント モデルと PID ブロックに正しく接続したら、調整と実験の設定を指定します。
[調整] タブには 2 つの主要な調整設定があります。
ターゲットの帯域幅 - コントローラーの望ましい応答速度を指定します。この例では、電流制御に
5000ラジアン/秒、速度制御に100ラジアン/秒を選択します。
ターゲットの位相余裕 - コントローラーの望ましいロバスト性を指定します。この例では、電流制御に
70度、速度制御に90度を選択します。
[実験] タブには 3 つの主要な実験設定があります。
プラント タイプ - プラントが漸近的に安定か、または積分であるかを指定します。この例では、FOC PMSM モデルは安定です。
プラントの符号 - プラントが正と負のどちらの符号をもつかを指定します。定格操作点でのプラント入力における正の変化によって、プラントが新しい定常状態に達したときにプラント出力に正の変化が生じる場合、プラントの符号は正になります。それ以外の場合、プラントの符号は負です。プラントが安定の場合、プラントの符号はその DC ゲインの符号に等しくなります。プラントが積分の場合、プラントの符号は、プラント出力が増加し続ける場合は正、減少し続ける場合は負になります。この例では、FOC PMSM モデルのプラントの符号は正です。
正弦波振幅 - 挿入される正弦波の振幅を指定します。この例では、電流コントローラーに
0.25、速度コントローラーに0.01を選択して、プラントが飽和制限内で確実に正しく励起されるようにします。励起の振幅が大きすぎたり小さすぎたりすると、周波数応答の推定結果が不正確になります。
カスケード フィードバック ループの調整
Closed-Loop PID Autotuner ブロックは一度に 1 つの PI コントローラーのみを調整するため、FOC PMSM モデルの 3 つのコントローラーを個別に調整しなければなりません。最初に内側のループのコントローラーを調整してから、外側のループのコントローラーを調整します。
d 軸の電流コントローラーは 1.3 ~ 1.35 秒の間で調整されます。
q 軸の電流コントローラーは 1.4 ~ 1.45 秒の間で調整されます。
速度コントローラーは 1.5 ~ 3.5 秒の間で調整されます。
各 PI コントローラーの調整後、Data Store Memory ブロックによってコントローラー ゲインが更新されます。
ノーマル モードでの自動調整器ブロックのシミュレーション
この例では FOC PMSM モデルが Simulink で作成されています。3 つのコントローラーがすべて 1 回のシミュレーションで調整されます。さらに、コントローラーを調整する前と後の速度応答間で応答が比較されます。
FOC PMSM モデルのシミュレーションは、モーターのパワー エレクトロニクス コントローラーのサンプル時間が小さいため、通常はコンピューター上で数分かかります。
sim(mdl) logsout_autotuned = logsout; save('AutotunedSpeed','logsout_autotuned')
次の図はシミュレーション結果全体を示しています。
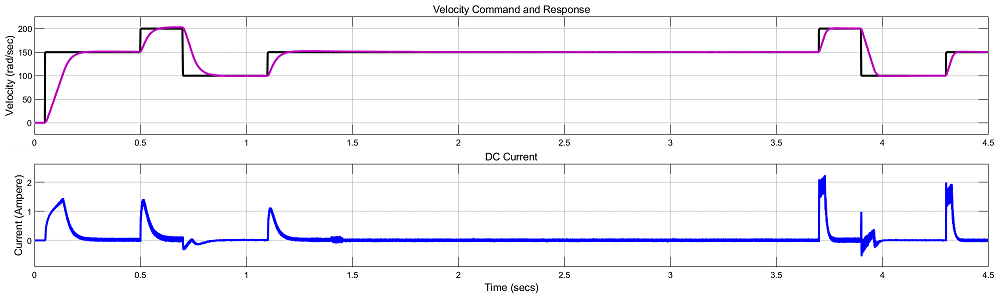
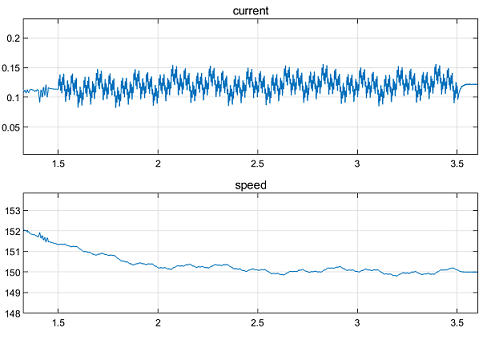
次の図は、調整中の 1.3 ~ 3.5 秒の電流と速度の応答を示しています。電流の変化は 0.1 A 以内、モーター速度の変化は 2 ラジアン/秒 (約 1% の偏差) 以内です。
3 つの PI コントローラーは新しいゲインで調整されています。
速度の PI コントローラーのゲインは P = 0.2785 および I = 2.678 です。
d 軸の電流の PI コントローラーのゲインは P = 5.135 および I = 8663 です。
q 軸の電流の PI コントローラーのゲインは P = 4.59 および I = 8026 です。
自動調整プロセスの前と後に同じ速度コマンドが適用されています。Closed-Loop PID Autotuner ブロックを使用したコントローラーの調整の前と後の速度応答をプロットします。速度応答の曲線は、コントローラーの性能を並べて比較できるように時間が揃えられています。
scdfocmotorPIDTuningPlotSpeed
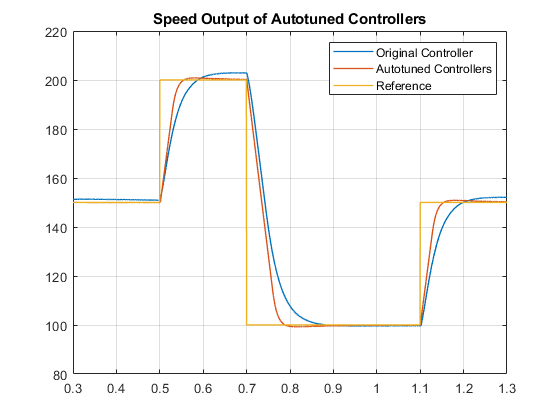
コントローラーを調整した後、AC モーターの速度応答は過渡応答がより高速になり、定常状態誤差がより小さくなります。
bdclose(mdl)