モデル参照インスタンスの信号の表示
以下の例では、次のような操作方法を説明します。
参照モデルの信号をログに記録するようにモデルを構成する。
シミュレーション データ インスペクターを使用して、参照モデルのログ記録された信号を表示および解析する。
モデルの階層構造の最上位モデルを開く
MultiInstanceModelExample という名前の最上位モデルには、それぞれ LimitedCounter という名前のモデルを参照する 3 つの Model ブロックが含まれています。
最上位モデルを開くには、MultiInstance という名前のプロジェクトを開きます。

参照モデルでログに記録する信号の設定
シミュレーション データ インスペクターを使用して信号を表示するには、参照モデルを編集してログ記録用に信号にマークを付けます。
参照モデルで、既に 4 つの信号がログ記録用にマークされています。ログ記録用に raw output という名前の信号をマークするには、その信号を選択します。次に、省略記号の上にマウスをポイントします。操作バーから [選択した信号のログ] を選択します。

あるいは、複数の信号を選択します。次に、[シミュレーション] タブで、[信号のログ] をクリックします。
参照モデルでログに記録する信号を選択したら、階層構造の最上位モデルからログに記録する信号を選択します。[モデル化] タブで、[モデル設定] をクリックします。
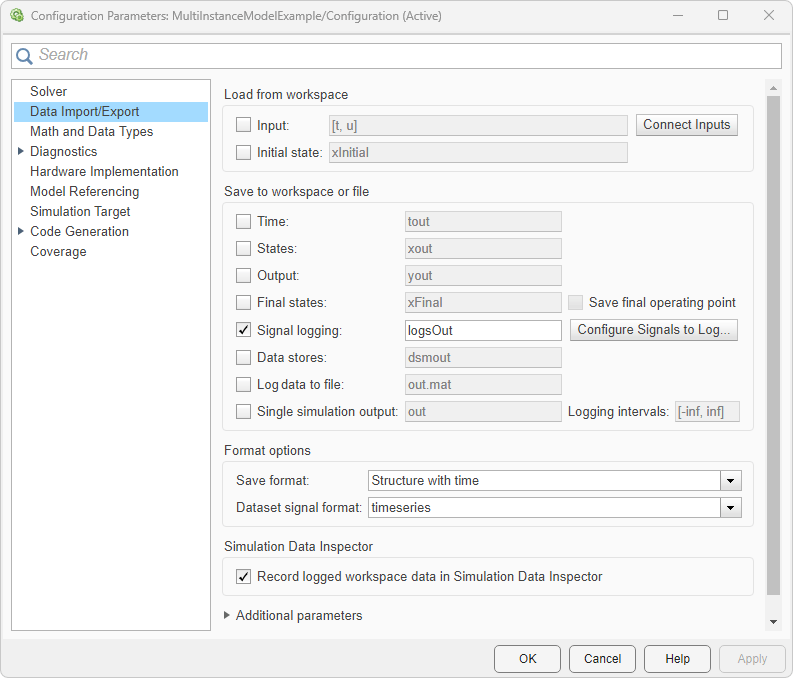
[データのインポート/エクスポート] ペインで [ログを取るために信号を設定] をクリックします。[Simulink 信号ログ セレクター] ダイアログ ボックスが開きます。

参照モデルの信号をログに記録する場合、2 つのログ モードを使用できます。
参照モデルのログ記録設定を適用するには、[ログ モード] を
Log all signals as specified in modelに設定します。参照モデルのログ記録設定をオーバーライドするには、[ログ モード] を
Override signalsに設定します。たとえば、このオプションを使用すると、参照モデル内の信号のログ記録を無効にしたり、ログ記録される信号のプロパティ (間引きや名前など) を構成したりできます。
シミュレーション データ インスペクターを使用したログ信号の表示と解析
モデルの階層構造に対してログ記録を構成し、モデルに対する変更を保存したら、モデルのシミュレーションを実行します。シミュレーションにより、Dataset オブジェクトがベース ワークスペースに作成されます。標準の MATLAB® ツールまたは Simulink® シミュレーション データ インスペクターを使用して、このオブジェクト内のログ記録されたデータを解析および表示します。
シミュレーション データ インスペクターを使用すると、以下の操作を実行できます。
ログ信号の信号トレースの表示
ログ信号の信号値の視覚的な比較
複数のシミュレーションにわたって収集された信号値の比較
たとえば、シミュレーション データ インスペクターを使用して、参照モデルの 2 つのインスタンスの output という名前の信号を表示します。シミュレーション データ インスペクターで、CounterA という名前の Model ブロックの出力の方が、CounterB という名前の Model ブロックの出力よりも急激に増加していることが示されます。CounterA という名前の Model ブロックを駆動する Pulse Generator ブロックは、CounterB という名前の Model を駆動する Pulse Generator ブロックよりも速いレートで実行されているため、これは想定される動作です。

検証テーブルに表示する内容を構成するには、テーブルの右上にあるギア アイコンをクリックします。

シミュレーション データ インスペクターを使用したシミュレーション結果の比較
シミュレーション データ インスペクターでは、複数のシミュレーション実行を比較することもできます。この機能は、モデルの変更が結果にどのように影響するかを把握するのに役立ちます。たとえば、最上位モデル内の upper という名前のブロックをダブルクリックします。次に、[値] を 8 に設定し、モデルのシミュレーションを実行します。
CounterA という名前の Model ブロック出力のシミュレーション結果を比較します。予想どおり、この信号の上限が 10 から 8 に変更されています。許容誤差が 0 に設定されているため、各信号の横にある赤い八角形は、2 回の実行の間で値が変更されたことを示しています。
