Timed-Based Linearization
ベース ワークスペースで特定の時間に線形モデルを生成
ライブラリ:
Simulink /
Model-Wide Utilities
説明
このブロックは、シミュレーション クロックが [線形化の時間] パラメーターで指定された時間に達すると、関数 linmod または関数 dlinmod を呼び出してシステムの線形モデルを生成します。平衡化は行われません。線形モデルは、スナップショットが取得される操作点に関する情報と共に構造体としてベースワークスペースに格納されます。複数のスナップショットが追加され、構造体の配列が形成されます。
メモ
linmod と dlinmod では基本的な線形化の機能のみが提供されています。完全な線形化の機能については、Simulink® Control Design™ ソフトウェアを使用してください。詳細については、線形化ツールの選択 (Simulink Control Design)を参照してください。
このブロックは、次のモデル パラメーターの値を設定します。
BufferReuse = 'off'BlockReductionOpt = 'off'
スナップショットを保存するために使用される構造体の名前は、_Timed_Based_Linearization を追加したモデルの名前です。たとえば、vdp_Timed_Based_Linearization。この構造体には、以下のフィールドがあります。
| フィールド | 説明 |
|---|---|
| 線形化 A の行列 |
| 線形化 B の行列 |
| 線形化 C の行列 |
| 線形化 D の行列 |
| モデルの状態名 |
| モデルの出力端子名 |
| モデルの入力端子名 |
| 線形化の操作点を指定する構造体。構造体は、操作点の時間 ( |
| 離散的線形化のための線形化のサンプル時間 |
ヒント
モデルを条件付きで生成するには、Trigger-Based Linearization ブロックを使用します。
例
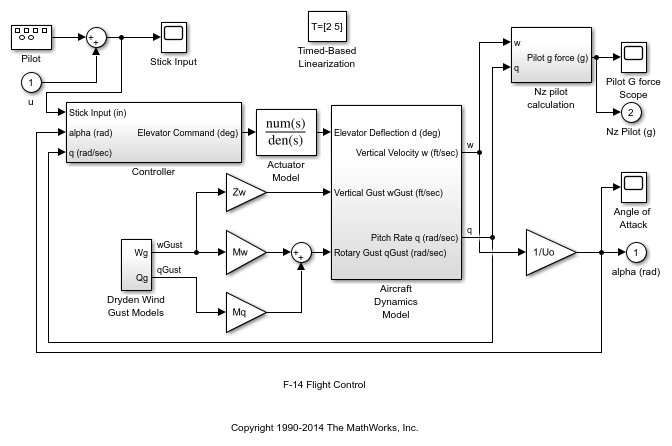
この例では、Timed-Based Linearization ブロックを使用して、あらかじめ決められた時間に線形モデルを生成する方法を示します。
このモデルでは、Timed-Based Linearization ブロックの [線形化の時間] を [2 5] に設定します。[モデル コンフィギュレーション パラメーター] ダイアログ ボックスの [データのインポート/エクスポート] ペインで、States および Time チェック ボックスはオンになっています。この設定をすることで、シミュレーション時間が 2 秒および 5 秒のときにモデルの状態を取得できます。
モデルのシミュレーションが終わると、MATLAB® ワークスペースに次の変数が表示されます。
ex_f14_linearization_Timed_Based_Linearization
tout
xout
操作点時間へのインデックスを取得するには、次のコマンドを実行します。
ind1 = find(ex_f14_linearization_Timed_Based_Linearization(1).OperPoint.t==tout);
操作点の状態ベクトルを取得するには、次のコマンドを実行します。
ind2 = find(ex_f14_linearization_Timed_Based_Linearization(1).OperPoint.t==tout);
パラメーター
ブロックの特性
データ型 | |
直達 |
|
多次元信号 |
|
可変サイズの信号 |
|
ゼロクロッシング検出 |
|
バージョン履歴
R2010a で導入