Derivative
時間に関して連続入力信号の連続状態変数の微分係数の近似を計算する
ライブラリ:
Simulink /
Continuous
説明
シミュレーション時間 t について、Derivative ブロックが連続入力信号 u の連続状態変数の微分係数を近似します。連続サンプル時間をもつ微分可能信号の微分を計算する必要がある場合は、Derivative ブロックを使用します。
Derivative ブロックを不適切に使用すると、シミュレーション結果が不正確になることがあります。可能であれば、Derivative ブロックの以下の代替方法を検討してください。
微分ではなく積分を求めるようにシステム方程式を変更します。次に、微分ではなく Integrator ブロックなどのブロックを使用して積分を求めるように、新しい方程式に基づいてモデルを構成します。
例については、最適な形式の数学モデルを参照してください。
Transfer Fcn ブロックも Derivative ブロックの入力信号または出力信号に作用する場合は、代わりに伝達関数で零点を追加することで信号の微分を実装します。
離散システムで離散信号の有限差分または差分の商を計算するには、Discrete Derivative ブロックを使用します。
Derivative ブロックを使用する必要がある場合は、連続サンプル時間をもつ微分可能な入力信号でのみそのブロックを使用します。
この端子に接続されている信号に離散サンプル時間または固定マイナー サンプル時間が含まれている場合は、警告が出されます。 (R2023b 以降)
入力信号に定数サンプル時間が含まれている場合には警告は出されませんが、信号値を調整すると、入力信号で不連続点が生じます。このような不連続点で微分すると、出力信号にスパイクが発生します。
離散システムで離散信号の有限差分または差分の商を計算するには、Discrete Derivative ブロックを使用します。
連続状態変数の微分係数近似の精度の確認
Derivative ブロックを使用する場合は、ブロックの出力信号の精度が要件を満たしていることを確認する必要があります。近似のコンテキストで使用する場合でも、Derivative ブロックの出力信号の精度はステップ サイズに依存しており、システムの残りのダイナミクスに左右されることもあります。
[最大ステップ サイズ] パラメーターを使用して、精度の要件を満たすには大きすぎるステップが可変ステップ ソルバーによって実行されないようにします。最大ステップ サイズに適切な値を選択するには、シミュレーションを複数回実行する必要が生じることがあります。
可変ステップ シミュレーションでは、ソルバーはモデル全体で連続状態の計算の誤差を監視して各メジャー タイム ステップのサイズを決定します。連続状態の計算値の誤差が指定した許容誤差レベルを超えている場合、ソルバーは誤差が許容誤差内に収まるようになるまでステップ サイズを削減します。
Derivative ブロックには連続状態が含まれていないため、ソルバーはステップ サイズを調整して Derivative ブロックが許容誤差要件を満たしていることを確認できません。入力信号値が急激に変化したときにソルバーが大きいタイム ステップを実行すると、ブロックで予期しない出力値が生成されることがあります。
例
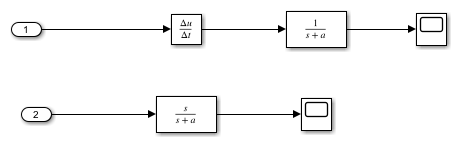
Transfer Fcn ブロックによる線形化の改善
Transfer Fcn ブロックによる線形化の改善
端子
入力
出力
パラメーター
ブロックの特性
データ型 |
|
直達 |
|
多次元信号 |
|
可変サイズの信号 |
|
ゼロクロッシング検出 |
|
アルゴリズム
Derivative ブロックは数値の差 を計算して、連続状態変数の微分係数 を近似します。ここで、 は入力信号値の変化であり、 はソルバーが現在のシミュレーション時間に達するために進めたメジャー タイム ステップのサイズです。連続状態変数の微分係数の近似の精度は、入力信号の変化率とステップ サイズに依存しています。
Derivative ブロックの初期出力値は常に 0 です。初期出力値を考慮し、次の方程式がブロックの入力信号と出力信号の正確な関係を表します。
t は現在のシミュレーション時間です。
はシミュレーションの最終のメジャー タイム ヒットの時間です。