modalfit
周波数応答関数からのモーダル パラメーター
構文
説明
[___] = modalfit( は同定されたモデル sys,f,mnum,Name,Value)sys のモーダル パラメーターを推定します。ssest (System Identification Toolbox) や tfest (System Identification Toolbox) などの推定コマンドを使用して、測定された周波数応答関数から、または時間領域の入力信号および出力信号から sys を作成します。この構文では、名前と値の引数 'DriveIndex'、'FreqRange' および 'PhysFreq' を指定できます。通常は、ノンパラメトリック法を使用する構文より必要なデータは少なくなります。この構文を使用するには、System Identification Toolbox™ のライセンスを所有していなければなりません。
例
シンプルな単入力/単出力システムの周波数応答関数を推定し、定義と比較します。
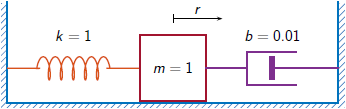
弾性定数が N/m であるバネで壁につながれた単位質量 (kg 単位) の物体で構成される 1 次元の離散時間振動系について考えます。センサーによりこの質量の変位を Hz でサンプリングします。ダンパーによって速度に比例する力が物体に加わるため、物体の運動が妨げられます。減衰定数は kg/s です。
3000 個の時間サンプルを生成します。サンプリング間隔は と定義します。
Fs = 1; dt = 1/Fs; N = 3000; t = dt*(0:N-1); b = 0.01;
このシステムは次の状態空間モデルで表すことができます。
ここで、 は状態ベクトル、 および はそれぞれ質量の変位と速度、 は駆動力、 は測定出力です。状態空間行列は次のようになります。
は の単位行列で、連続時間状態空間行列は次のようになります。
Ac = [0 1;-1 -b]; A = expm(Ac*dt); Bc = [0;1]; B = Ac\(A-eye(2))*Bc; C = [1 0]; D = 0;
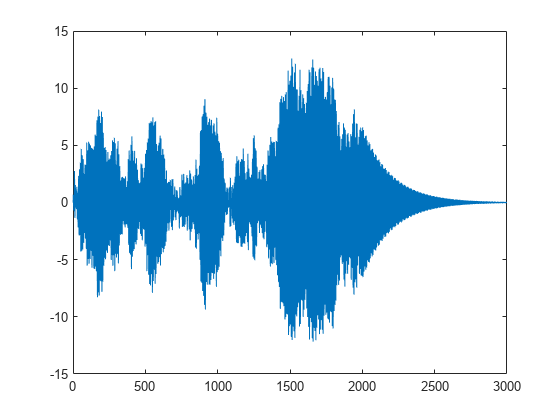
質量はランダム入力でまず 2000 秒間駆動され、次に静止状態に戻るまで放置されます。状態空間モデルを使用して、すべてゼロの初期状態からの系の時間発展を計算します。質量の変位を時間の関数としてプロットします。
rng("default") u = randn(1,N)/2; u(2001:end) = 0; y = 0; x = [0;0]; for k = 1:N y(k) = C*x + D*u(k); x = A*x + B*u(k); end plot(t,y)
システムのモーダル周波数応答関数を推定します。測定信号の 1/2 の長さでハン ウィンドウを使用します。出力を質量の変位として指定します。
wind = hann(N/2);
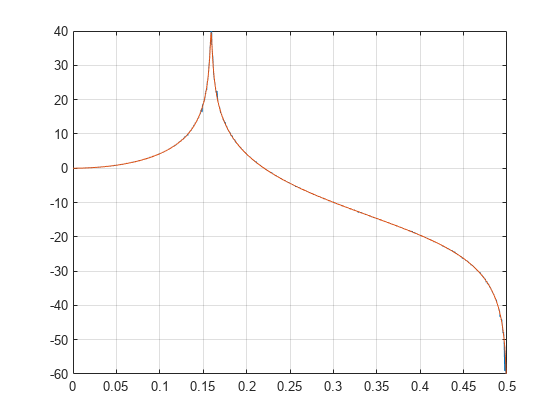
[frf,f] = modalfrf(u',y',Fs,wind,Sensor="dis");離散時間システムの周波数応答関数は、単位円で評価されたシステムの時間領域伝達関数の Z 変換として表すことができます。modalfrf の推定を定義と比較します。
[b,a] = ss2tf(A,B,C,D); [ztf,fz] = freqz(b,a,2048,Fs); plot(f,mag2db(abs(frf))) hold on plot(fz*Fs,mag2db(abs(ztf))) hold off grid ylim([-60 40])
振動モードの固有振動数と減衰比を推定します。
[fn,dr] = modalfit(frf,f,Fs,1,FitMethod="PP")fn = 0.1593
dr = 0.0043
固有振動数を と比較します。これは非減衰システムの理論値です。
theo = 1/(2*pi)
theo = 0.1592
宇宙ステーション モジュールの周波数応答関数 (FRF) 配列からそのモーダル パラメーターを計算します。
3 入力/3 出力の FRF 配列を含む構造体を読み込みます。そのシステムは、320 Hz でサンプリングされます。
load modaldata SpaceStationFRF frf = SpaceStationFRF.FRF; f = SpaceStationFRF.f; fs = SpaceStationFRF.Fs;
最小二乗有理関数法を使用して最小 24 のモードのモーダル パラメーターを抽出します。
[fn,dr,ms,ofrf] = modalfit(frf,f,fs,24,'FitMethod','lsrf');
再構成した FRF 配列を測定した配列と比較します。
for ij = 1:3 for ji = 1:3 subplot(3,3,3*(ij-1)+ji) loglog(f,abs(frf(:,ji,ij))) hold on loglog(f,abs(ofrf(:,ji,ij))) hold off axis tight title(sprintf('In%d -> Out%d',ij,ji)) if ij==3 xlabel('Frequency (Hz)') end end end

多入力/多出力 (MIMO) システムのモーダル パラメーターを推定します。
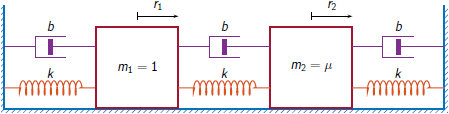
両側にバネとダンパーが接続された 2 つの質量は、理想的な 1 次元離散時間振動システムを形成します。システム入力配列 u は、質量に適用されるランダムな駆動力で構成されます。システム出力配列 y には、初期の基準位置からの質量の観測変位が格納されます。システムは 40 Hz のレート Fs でサンプリングされます。
MIMO システム入力、システム出力、およびサンプル レートを含むデータ ファイルを読み込みます。この例で使用するデータを生成したシステムは、Frequency-Response Analysis of MIMO Systemの例で解析しています。
load MIMOdataシステムのモーダル周波数応答関数を推定します。隣接するセグメント間で 9000 サンプルがオーバーラップする 12000 サンプルのハン ウィンドウを使用します。センサー データ タイプを測定変位として指定します。
wind = hann(12000);
nove = 9000;
[frf,f] = modalfrf(u,y,Fs,wind,nove,Sensor="dis");システムの固有振動数、減衰比、モード形状を推定します。2 つのモードを使用し、計算には最小二乗有理関数推定法を選択します。
[fn,dr,ms] = modalfit(frf,f,Fs,2,FitMethod="lsrf")fn = 2×1
3.8412
3.8477
dr = 2×1
0.0003
0.0030
ms = 2×2 complex
0.0173 - 0.0014i 0.0804 - 0.1146i
0.0093 - 0.0008i 0.0434 - 0.0618i
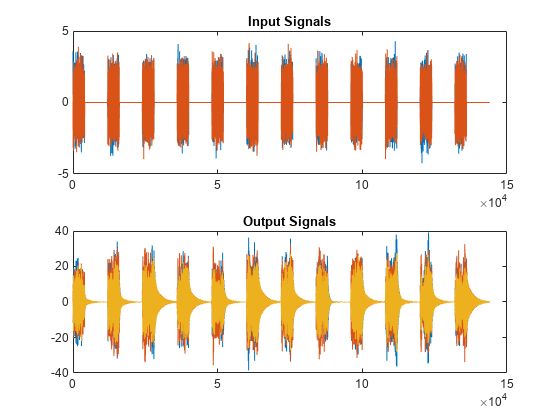
いくつかのバーストのランダム ノイズで励起される 2 入力/3 出力システムの固有振動数、減衰比、モード形状を計算します。各バーストは 1 秒間持続し、各バーストの終了と次の開始の間は 2 秒間です。データは 4 kHz でサンプリングされています。
データ ファイルを読み込みます。入力信号と出力信号をプロットします。
load modaldata subplot(2,1,1) plot(Xburst) title('Input Signals') subplot(2,1,2) plot(Yburst) title('Output Signals')
周波数応答関数を計算します。長さがバースト周期に等しく、隣接するセグメント間のオーバーラップがない箱型ウィンドウを指定します。
burstLen = 12000; [frf,f] = modalfrf(Xburst,Yburst,fs,burstLen);
安定化ダイアグラムを可視化して、安定した固有振動数を返します。最大モデル次数として 30 モードを指定します。
figure
modalsd(frf,f,fs,'MaxModes',30);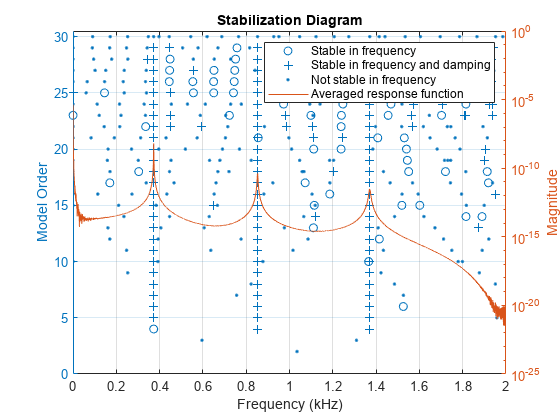
プロットを拡大します。平均応答関数は 373 Hz、852 Hz、1371 Hz で最大値をもち、これはシステムの物理周波数に対応します。最大値を変数に保存します。
phfr = [373 852 1371];
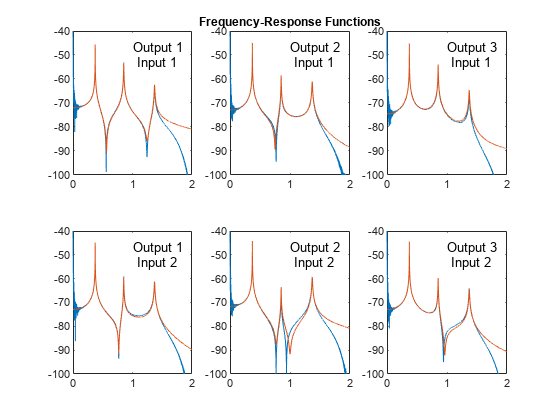
最小二乗複素指数 (LSCE) アルゴリズムを使用してモーダル パラメーターを計算します。モデル次数として 6 モードを指定し、安定化ダイアグラムから決定された物理周波数として 3 モードを指定します。関数により、各入力基準に対して固有振動数と減衰比の 1 つのセットが生成されます。
[fn,dr,ms,ofrf] = modalfit(frf,f,fs,6,'PhysFreq',phfr);再構成された周波数応答関数をプロットし、元のものと比較します。
for k = 1:2 for m = 1:3 subplot(2,3,m+3*(k-1)) plot(f/1000,10*log10(abs(frf(:,m,k)))) hold on plot(f/1000,10*log10(abs(ofrf(:,m,k)))) hold off text(1,-50,[['Output ';' Input '] num2str([m k]')]) ylim([-100 -40]) end end subplot(2,3,2) title('Frequency-Response Functions')
入力引数
周波数応答関数。ベクトル、行列または 3 次元配列で指定します。frf のサイズは p × m × n です。ここで、p は周波数ビンの数、m は応答信号の数、n は伝達関数を推定するための励起信号の数です。frf は動的柔軟性 (レセプタンス) 形式であると仮定します。
modalfrf を使用して、測定データから周波数応答関数の行列を生成します。
例:非減衰高調波発振器
のレートでサンプリングされた単位質量と弾性定数の単純な非減衰高調波発振器の運動は、次の伝達関数で記述されます。
,
分子は、測定される振幅によって異なります。
変位:
速度:
加速度:
可能性のある 3 種類のシステム応答センサーの周波数応答関数を計算します。2 Hz のサンプル レートと 30,000 のホワイト ノイズのサンプルを入力として使用します。
fs = 2; dt = 1/fs; N = 30000; u = randn(N,1); ydis = filter((1-cos(dt))*[0 1 1],[1 -2*cos(dt) 1],u); [frfd,fd] = modalfrf(u,ydis,fs,hann(N/2),Sensor="dis"); yvel = filter(sin(dt)*[0 1 -1],[1 -2*cos(dt) 1],u); [frfv,fv] = modalfrf(u,yvel,fs,hann(N/2),Sensor="vel"); yacc = filter([1 -(1+cos(dt)) cos(dt)],[1 -2*cos(dt) 1],u); [frfa,fa] = modalfrf(u,yacc,fs,hann(N/2),Sensor="acc"); loglog(fd,abs(frfd),fv,abs(frfv),fa,abs(frfa)) grid legend(["dis" "vel" "acc"],Location="best")
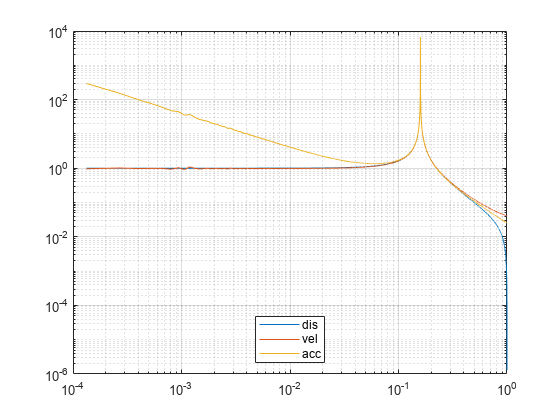
いずれの場合も、生成される周波数応答関数は変位に対応する形式になっています。速度と加速度の測定値は、それぞれ変位測定値の 1 次微分と 2 次微分です。周波数応答関数は、システムの固有振動数付近の範囲では等価です。固有振動数から離れたところでは、周波数応答関数は異なります。
データ型: single | double
複素数のサポート: あり
周波数。ベクトルとして指定します。f の要素数は、frf の行数と等しくなければなりません。
データ型: single | double
測定値データのサンプル レート。ヘルツ単位の正のスカラーとして指定します。
データ型: single | double
モード数。正の整数で指定します。
データ型: single | double
識別されたシステム。識別されたパラメーターをもつモデルとして指定します。ssest (System Identification Toolbox) や n4sid (System Identification Toolbox)、tfest (System Identification Toolbox) などの推定コマンドを使用して、測定された周波数応答関数から、または時間領域の入力信号および出力信号から sys を作成します。例については、識別したモデルのモード解析を参照してください。この入力引数を使用するには、System Identification Toolbox のライセンスを所有していなければなりません。
例: idss([0.5418 0.8373;-0.8373 0.5334],[0.4852;0.8373],[1 0],0,[0;0],[0;0],1) は、識別された状態空間モデルを生成します。生成されるモデルは、単位弾性定数をもつバネと定数 0.01 のダンパーで壁につながれた単位質量に対応します。質量の変位は 1 Hz でサンプリングされます。
例: idtf([0 0.4582 0.4566],[1 -1.0752 0.99],1) は、識別された伝達関数モデルを生成します。生成されるモデルは、単位弾性定数をもつバネと定数 0.01 のダンパーで壁につながれた単位質量に対応します。質量の変位は 1 Hz でサンプリングされます。
名前と値の引数
出力引数
アルゴリズム
参照
[1] Allemang, Randall J., and David L. Brown. “Experimental Modal Analysis and Dynamic Component Synthesis, Vol. III: Modal Parameter Estimation.” Technical Report AFWAL-TR-87-3069. Air Force Wright Aeronautical Laboratories, Wright-Patterson Air Force Base, OH, December 1987.
[2] Brandt, Anders. Noise and Vibration Analysis: Signal Analysis and Experimental Procedures. Chichester, UK: John Wiley & Sons, 2011.
[3] Ozdemir, Ahmet Arda, and Suat Gumussoy. "Transfer Function Estimation in System Identification Toolbox via Vector Fitting." Proceedings of the 20th World Congress of the International Federation of Automatic Control, Toulouse, France, July 2017.
拡張機能
バージョン履歴
R2017a で導入参考
modalfrf | modalsd | n4sid (System Identification Toolbox) | tfest (System Identification Toolbox) | tfestimate
トピック
- 識別したモデルのモード解析
- System Identification Overview (System Identification Toolbox)
- システム同定ワークフロー (System Identification Toolbox)
- Supported Continuous- and Discrete-Time Models (System Identification Toolbox)