直方体シナリオ シミュレーション
静的メッシュ、ロボット プラットフォーム、センサーで構成されるシナリオ
robotScenario オブジェクトと、GPS や LiDAR などのセンサー モデルを使用して低忠実度のシナリオを作成およびシミュレーションし、ロボティクス アルゴリズムをテストします。
関数
トピック
- Execute Code at a Fixed-Rate
By executing code at constant intervals, you can accurately time and schedule tasks.
注目の例
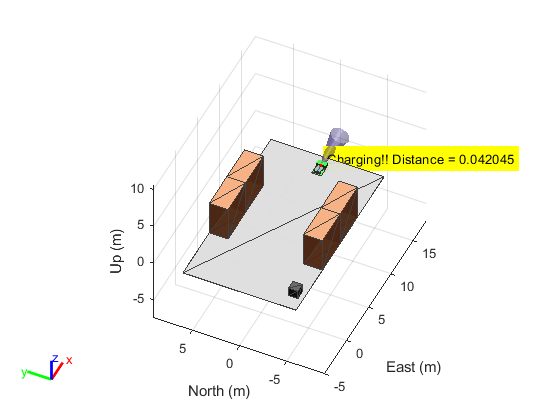
Simulate Ultrasonic Sensors Mounted on Mobile Robots
Implement a custom sensor adaptor to integrate ultrasonic sensors with robotScenario for mobile robot positioning at a charging station.

モバイル ロボットを使用したパス プランニング シミュレーションの実行
シナリオを作成してモバイル ロボットをモデル化し、シナリオから占有グリッド マップを取得し、mobileRobotPRM を使用してパス プランニングを行う。

Perform Pick and Place with Collision-Object-Based Obstacle Avoidance in Robot Scenario
Create a collision-object meshes scene and add rigid body tree model to plan motion with RRT and simulate pick-and-place workflow.