robotScenario
説明
robotScenario オブジェクトは、3 次元環境内の静的メッシュ、ロボット プラットフォーム、およびセンサーで構成されるシミュレーション シナリオを生成します。
作成
説明
scenario = robotScenario
scenario = robotScenario(Name=Value)robotScenario オブジェクトのプロパティを構成します。
プロパティ
オブジェクト関数
addInertialFrame | Define new inertial frame in robot scenario |
addMesh | Add new static mesh to robot scenario |
advance | Advance robot scenario simulation by one time step |
binaryOccupancyMap | Create 2-D binary occupancy map from robot scenario |
restart | Reset simulation of robot scenario |
setup | Prepare robot scenario for simulation |
show3D | Visualize robot scenario in 3-D |
updateSensors | Update sensor readings in robot scenario |
例
ロボット シナリオを作成します。
scenario = robotScenario(UpdateRate=100,StopTime=1);
地面とボックスをメッシュとして追加します。
addMesh(scenario,"Plane",Size=[3 3],Color=[0.7 0.7 0.7]); addMesh(scenario,"Box",Size=[0.5 0.5 0.5],Position=[0 0 0.25], ... Color=[0 1 0])
ENU 基準座標系を使用してロボット プラットフォームのウェイポイント軌跡を作成します。
waypoint = [0 -1 0; 1 0 0; -1 1 0; 0 -1 0]; toa = linspace(0,1,length(waypoint)); traj = waypointTrajectory("Waypoints",waypoint, ... "TimeOfArrival",toa, ... "ReferenceFrame","ENU");
TurtleBot 3 Waffle Pi ロボットの rigidBodyTree オブジェクトを loadrobot で作成します。
robotRBT = loadrobot("robotisTurtleBot3WafflePi");軌跡をもつロボット プラットフォームを作成します。
platform = robotPlatform("TurtleBot",scenario, ... BaseTrajectory=traj);
rigidBodyTree オブジェクトでプラットフォームのメッシュを設定します。
updateMesh(platform,"RigidBodyTree",Object=robotRBT)INS センサー オブジェクトを作成し、そのセンサーをプラットフォームに取り付けます。
ins = robotSensor("INS",platform,insSensor("RollAccuracy",0), ... UpdateRate=scenario.UpdateRate);
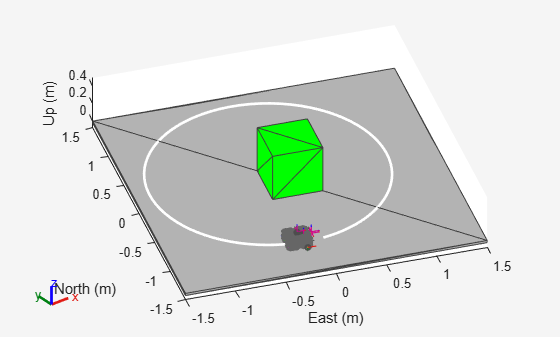
シナリオを可視化します。
[ax,plotFrames] = show3D(scenario); axis equal hold on
ループで軌跡をステップ実行し、位置、向き、速度、加速度、角速度を出力します。
count = 1; while ~isDone(traj) [Position(count,:),Orientation(count,:),Velocity(count,:), ... Acceleration(count,:),AngularVelocity(count,:)] = traj(); count = count+1; end
軌跡のライン プロットを作成します。まず、plot3 を使用してプロットを作成してから、プロットのデータ ソースのプロパティを手動で変更します。これにより、プロットのパフォーマンスが向上します。
trajPlot = plot3(nan,nan,nan,"Color",[1 1 1],"LineWidth",2); trajPlot.XDataSource = "Position(:,1)"; trajPlot.YDataSource = "Position(:,2)"; trajPlot.ZDataSource = "Position(:,3)";
シミュレーションを設定します。次に、位置を使用して反復し、INS センサーが更新されるたびにシーンを表示します。シーンを進めてロボット プラットフォームを移動し、センサーを更新します。
setup(scenario) for idx = 1:count-1 % Read sensor readings. [isUpdated,insTimestamp(idx,1),sensorReadings(idx)] = read(ins); if isUpdated % Use fast update to move platform visualization frames. show3D(scenario,FastUpdate=true,Parent=ax); % Refresh all plot data and visualize. refreshdata drawnow limitrate end % Advance scenario simulation time. advance(scenario); % Update all sensors in the scene. updateSensors(scenario) end hold off
バージョン履歴
R2022a で導入
参考
オブジェクト
関数
addInertialFrame|addMesh|advance|binaryOccupancyMap|restart|setup|show3D|updateSensors