gpsSensor
説明
gpsSensor System object™ は、全地球測位システム (GPS) 受信機から出力されたデータをモデル化します。このオブジェクトは位置ノイズを 1 次ガウス マルコフ過程としてモデル化します。この過程では、シグマ値は HorizontalPositionAccuracy プロパティと VerticalPositionAccuracy プロパティで指定されます。このオブジェクトは、VelocityAccuracy プロパティで指定されたシグマ値を使用して、速度ノイズをガウス ノイズとしてモデル化します。
GPS 受信機をモデル化するには、次のようにします。
gpsSensorオブジェクトを作成して、そのプロパティを設定します。関数と同様に、引数を指定してオブジェクトを呼び出します。
System object の機能の詳細については、System object とはを参照してください。
作成
説明
GPS = gpsSensorgpsSensor System object を返します。測地座標における既定の基準位置は次のとおりです。
緯度: 0o N
経度: 0o E
高度: 0 m
GPS = gpsSensor('ReferenceFrame',RF)RF を基準として全地球測位システム受信機の読み取り値を計算する gpsSensor System object を返します。
GPS = gpsSensor(___, は、前述の入力引数に加えて、名前と値の引数を使用して 1 つ以上のプロパティを設定します。Name=Value)
入力引数
プロパティ
使用法
説明
[ は、位置と速度の入力から全地球航法衛星システムの受信機の読み取り値を計算します。position,velocity,groundspeed,course] = GPS(truePosition,trueVelocity)
入力引数
出力引数
オブジェクト関数
オブジェクト関数を使用するには、System object を最初の入力引数として指定します。たとえば、obj という名前の System object のシステム リソースを解放するには、以下の構文を使用します。
release(obj)
例
GPS 受信機データをモデル化するために gpsSensor System object™ を作成します。標準的な 1 Hz のサンプル レートと 1000 秒のシミュレーション時間を想定します。マサチューセッツ州ネイティック (米国) の緯度、経度、高度 (LLA) に基づいて基準位置を定義します。zeros を使用して実際の位置と速度を指定して、センサーを静止しているものとして定義します。
fs = 1; duration = 1000; numSamples = duration*fs; refLoc = [42.2825 -71.343 53.0352]; truePosition = zeros(numSamples,3); trueVelocity = zeros(numSamples,3); gps = gpsSensor('SampleRate',fs,'ReferenceLocation',refLoc);
指定された truePosition および trueVelocity を使用して gps を呼び出し、静止プラットフォームの GPS データの受信をシミュレートします。
position = gps(truePosition,trueVelocity);
実際の位置と GPS センサーの位置の読み取り値をプロットします。
t = (0:(numSamples-1))/fs; subplot(3, 1, 1) plot(t, position(:,1), ... t, ones(numSamples)*refLoc(1)) title('GPS Sensor Readings') ylabel('Latitude (degrees)') subplot(3, 1, 2) plot(t, position(:,2), ... t, ones(numSamples)*refLoc(2)) ylabel('Longitude (degrees)') subplot(3, 1, 3) plot(t, position(:,3), ... t, ones(numSamples)*refLoc(3)) ylabel('Altitude (m)') xlabel('Time (s)')
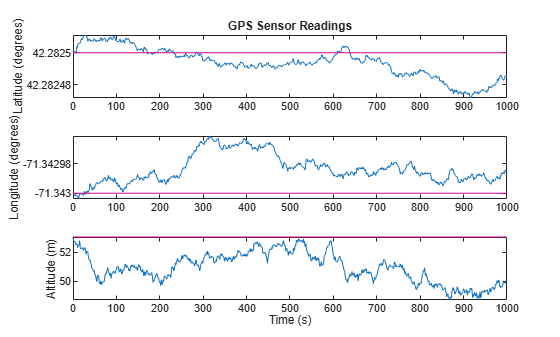
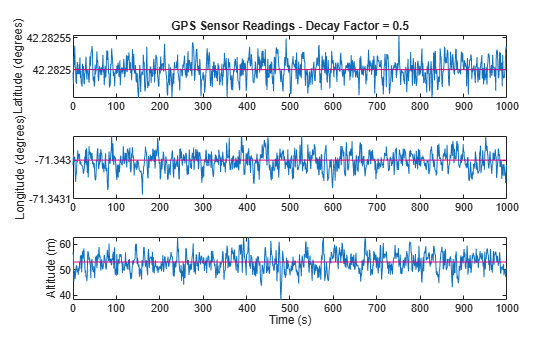
位置の読み取り値のノイズは、HorizontalPositionAccuracy、VerticalPositionAccuracy、VelocityAccuracy、および DecayFactor によって制御されます。DecayFactor プロパティは、ノイズ モデルのドリフトを制御します。既定では、DecayFactor は 0.999 に設定されており、ランダム ウォーク過程に近づきます。DecayFactor プロパティの効果を観察するには、以下のようにします。
gpsオブジェクトをリセットします。DecayFactorを0.5に設定します。静止位置を指定する変数を使用して
gpsを呼び出します。結果をプロットします。
GPS の位置の読み取り値は、実際の位置を中心として振動するようになりました。
reset(gps) gps.DecayFactor = 0.5; position = gps(truePosition,trueVelocity); subplot(3, 1, 1) plot(t, position(:,1), ... t, ones(numSamples)*refLoc(1)) title('GPS Sensor Readings - Decay Factor = 0.5') ylabel('Latitude (degrees)') subplot(3, 1, 2) plot(t, position(:,2), ... t, ones(numSamples)*refLoc(2)) ylabel('Longitude (degrees)') subplot(3, 1, 3) plot(t, position(:,3), ... t, ones(numSamples)*refLoc(3)) ylabel('Altitude (m)') xlabel('Time (s)')
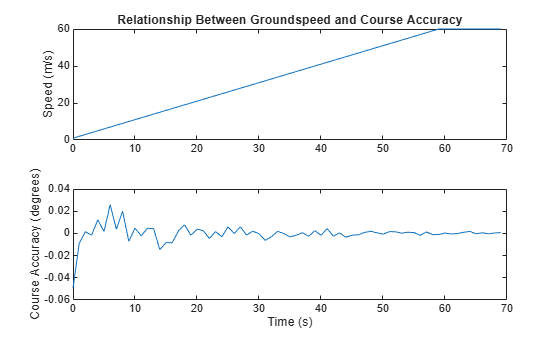
GPS 受信機で達成されるコース精度は、対地速度が増加するにつれて高くなります。この例では、GPS 受信機シミュレーション オブジェクトを作成し、静止位置から加速するプラットフォームから受信したデータをシミュレートします。
GPS 受信機から返されたデータをモデル化するために既定の gpsSensor System object™ を作成します。
GPS = gpsSensor
GPS =
gpsSensor with properties:
SampleRate: 1 Hz
PositionInputFormat: 'Local'
ReferenceLocation: [0 0 0] [deg deg m]
HorizontalPositionAccuracy: 1.6 m
VerticalPositionAccuracy: 3 m
VelocityAccuracy: 0.1 m/s
RandomStream: 'Global stream'
DecayFactor: 0.999
NED 座標系でプラットフォームの位置と速度を記述する行列を作成します。プラットフォームは静止位置から開始し、60 秒かけて北東方向に 60 m/s まで加速し、次に 2 秒かけて 2 m/s まで垂直方向に加速し、その後さらに 8 秒間上昇率 2 m/s を保ちます。速度が位置の単純な微分であるように速度が一定であると仮定します。
duration = 70; numSamples = duration*GPS.SampleRate; course = 45*ones(duration,1); groundspeed = [(1:60)';60*ones(10,1)]; Nvelocity = groundspeed.*sind(course); Evelocity = groundspeed.*cosd(course); Dvelocity = [zeros(60,1);-1;-2*ones(9,1)]; NEDvelocity = [Nvelocity,Evelocity,Dvelocity]; Ndistance = cumsum(Nvelocity); Edistance = cumsum(Evelocity); Ddistance = cumsum(Dvelocity); NEDposition = [Ndistance,Edistance,Ddistance];
速度行列と位置行列を使用して GPS オブジェクトを呼び出して、GPS 測定データをモデル化します。
[~,~,groundspeedMeasurement,courseMeasurement] = GPS(NEDposition,NEDvelocity);
対地速度と、実際のコースと GPS シミュレーターによって返されたコースとの差をプロットします。
対地速度が上がると、コースの精度も上がります。なお、最後の 10 秒間の速度の増加は、地面に対してではないため、影響はありません。
t = (0:numSamples-1)/GPS.SampleRate; subplot(2,1,1) plot(t,groundspeed); ylabel('Speed (m/s)') title('Relationship Between Groundspeed and Course Accuracy') subplot(2,1,2) courseAccuracy = courseMeasurement - course; plot(t,courseAccuracy) xlabel('Time (s)'); ylabel('Course Accuracy (degrees)')
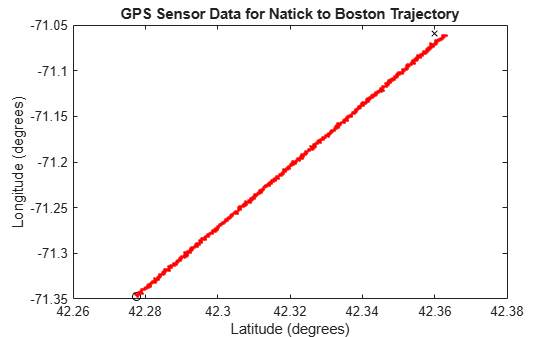
マサチューセッツ州ネイティック市からマサチューセッツ州ボストンまでの軌跡で受信した GPS データをシミュレートします。
米国マサチューセッツ州ネイティック市と米国マサチューセッツ州ボストンの小数の緯度と経度を定義します。単純化するために、両位置の高度をゼロに設定します。
NatickLLA = [42.27752809999999, -71.34680909999997, 0]; BostonLLA = [42.3600825, -71.05888010000001, 0];
ネイティックからボストンまで 20 分でプラットフォームを移動できる運動を定義します。ローカル NED 座標系の原点をネイティックに設定します。waypointTrajectory オブジェクトを作成して、一度に軌跡として 10 サンプルを出力します。
fs = 1; duration = 60*20; bearing = 68; % degrees distance = 25.39e3; % meters distanceEast = distance*sind(bearing); distanceNorth = distance*cosd(bearing); NatickNED = [0,0,0]; BostonNED = [distanceNorth,distanceEast,0]; trajectory = waypointTrajectory( ... 'Waypoints', [NatickNED;BostonNED], ... 'TimeOfArrival',[0;duration], ... 'SamplesPerFrame',10, ... 'SampleRate',fs);
プラットフォームの GPS データの受信をモデル化するために gpsSensor オブジェクトを作成します。HorizontalPositionalAccuracy を 25 に、DecayFactor を 0.25 に設定して、ノイズを強調します。ReferenceLocation をネイティックの座標 (LLA) に設定します。
GPS = gpsSensor( ... 'HorizontalPositionAccuracy',25, ... 'DecayFactor',0.25, ... 'SampleRate',fs, ... 'ReferenceLocation',NatickLLA);
Figure を開いて、ネイティックとボストンの位置 (LLA) をプロットします。単純化するために高度は無視します。
ループ内で、グラウンド トゥルースの軌跡を使用して gpsSensor オブジェクトを呼び出し、受信した GPS データをシミュレートします。グラウンドトゥルースの軌跡と受信した GPS データのモデルをプロットします。
figure(1) plot(NatickLLA(1),NatickLLA(2),'ko', ... BostonLLA(1),BostonLLA(2),'kx') xlabel('Latitude (degrees)') ylabel('Longitude (degrees)') title('GPS Sensor Data for Natick to Boston Trajectory') hold on while ~isDone(trajectory) [truePositionNED,~,trueVelocityNED] = trajectory(); reportedPositionLLA = GPS(truePositionNED,trueVelocityNED); figure(1) plot(reportedPositionLLA(:,1),reportedPositionLLA(:,2),'r.') end
ベスト プラクティスとして、完了したら System object を解放します。
release(GPS) release(trajectory)
拡張機能
バージョン履歴
R2022a で導入