view
カメラ視線
説明
[caz,cel] = view(___) は方位角と仰角をそれぞれ caz と cel として返します。前述の任意の構文から入力引数を指定して、新しい視線の角度を取得します。または、入力引数を指定しないで、現在の視線の角度を取得します。
例
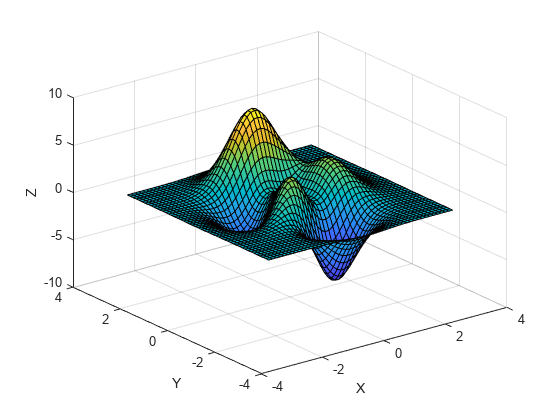
関数 peaks を使用して、表面の x、y、z 座標を取得します。次に、表面をプロットし、各軸にラベルを付けます。
[X,Y,Z] = peaks; surf(X,Y,Z) xlabel('X') ylabel('Y') zlabel('Z')

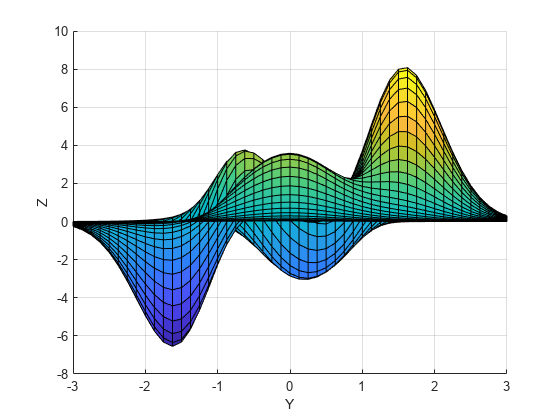
90 度の方位角と 0 度の仰角を使用してプロットを表示します。新しい視線は x 軸に沿っています。
view(90,0)
関数 peaks を使用して、表面の x、y、z 座標を取得します。次に、表面をプロットし、各軸にラベルを付けます。
[X,Y,Z] = peaks; surf(X,Y,Z) xlabel('X') ylabel('Y') zlabel('Z')
2 次元表示でプロットを表示します。
view(2)

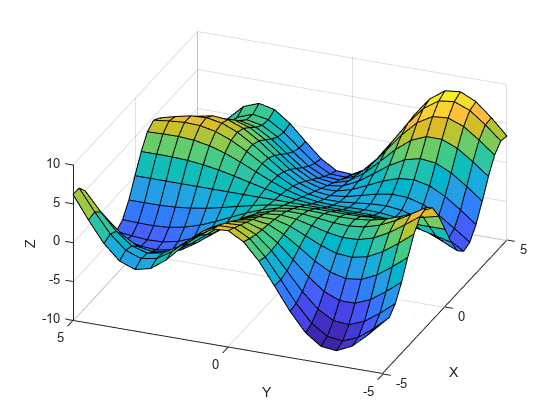
x、y、z 座標のセットを作成し、それらを使用して表面をプロットします。次に、各軸にラベルを付けます。
[X,Y] = meshgrid(-5:.5:5); Z = Y.*sin(X) - X.*cos(Y); surf(X,Y,Z) xlabel('X') ylabel('Y') zlabel('Z')

このプロットの方位角と仰角を取得します。
[caz,cel] = view
caz = -37.5000
cel = 30
v をベクトルの x、y、z 座標として指定して表示を変更し、新しい方位角と仰角を返します。新しい角度は、v と同じ方向に向かう単位ベクトルに基づきます。
v = [-5 -2 5]; [caz,cel] = view(v)
caz = -68.1986
cel = 42.8760
R2019b 以降、関数 tiledlayout および nexttile を使用して、プロットをタイル表示できます。関数 tiledlayout を呼び出して、1 行 2 列のタイル表示チャート レイアウトを作成します。関数 nexttile を呼び出して、axes オブジェクト ax1 および ax2 を作成します。それらを使用して、個別でありながら同一のライン プロットを作成します。
t = 0:pi/20:10*pi; xt1 = sin(t); yt1 = cos(t); tiledlayout(1,2) % Left plot ax1 = nexttile; plot3(ax1,xt1,yt1,t) xlabel('X') ylabel('Y') zlabel('Z') % Right plot ax2 = nexttile; plot3(ax2,xt1,yt1,t) xlabel('X') ylabel('Y') zlabel('Z')

右のプロットの表示を x 軸に沿って側面の表示に変更します。
view(ax2,[90 0]);

入力引数
方位角。負の y 軸からの角度 (度単位) として指定します。この角度の増加は、上部から x-y 平面を表示するときの z 軸周りの反時計回りの回転に対応します。
既定値はチャートが 2 次元表示と 3 次元表示のどちらであるかによって異なります。2 次元チャートの場合、既定値は 0 です。3 次元チャートの場合、既定値は -37.5 です。
例: view(45,25) は方位角を 45 度に、仰角を 25 度に設定します。
仰角。視線と x-y 平面間の最小角度 (度単位) を指定します。-90 度から 90 度への仰角の増加は、負の z 軸から正の z 軸への回転に対応します。
既定値はチャートが 2 次元表示と 3 次元表示のどちらであるかによって異なります。2 次元チャートの場合、既定値は 90 です。3 次元チャートの場合、既定値は 30 です。
例: view(45,25) は方位角を 45 度に、仰角を 25 度に設定します。
視線ベクトル。次のいずれかとして指定します。
方位角と仰角をそれぞれ含む 2 要素配列。
プロット ボックスの中心から発生してカメラに向かうベクトルの x、y、z 座標を含む 3 要素配列。MATLAB は同じ方向に向かう単位ベクトルから方位角と仰角を計算します。したがって、
vの大きさは視線に影響しません。
例: view([45 25]) は方位角を 45 度に、仰角を 25 度に設定します。
例: view([20 25 5]) はベクトル [20 25 5] と同じ方向を向くベクトルに視線を設定します。
次元。2 または 3 として指定します。この引数は MATLAB が 2 次元プロットまたは 3 次元プロットに使用する既定値に方位角と仰角を設定します。
dim の値 | 方位角 | 仰角 |
|---|---|---|
2 | 0 | 90 |
3 | -37.5 | 30 |
ターゲット座標軸。以下として指定します。
Axesオブジェクト。Axesオブジェクトの配列。(R2022a 以降)
この引数を指定しない場合、view は現在の座標軸を変更します。
詳細
視線はプロット ボックスの中心で開始し、カメラに向かいます。MATLAB はこの線を "方位角" と "仰角" の 2 つの角度を使用して定義します。これらの角度は、プロット ボックスの中心にその原点をもつ 3 次元座標系内で測定されます。
方位角 — z 軸周りの回転の角度。負の y 軸から測定されます。この角度の増加は、上部から x-y 平面を表示するときの z 軸周りの反時計回りの回転に対応します。
仰角 — 視線と x-y 平面間の最小角度。
-90度から90度への仰角の増加は、負の z 軸から正の z 軸への回転に対応します。
