最近傍探索
問題の次元によって、MATLAB での最近傍を計算する方法がいくつかあります。
2 次元探索および 3 次元探索では、
triangulationクラスにより提供され、delaunayTriangulationクラスにより継承されているnearestNeighborメソッドを使用します。4 次元以上では関数
delaunaynを使って、探索を実行するための三角形分割および相補関数dsearchnを作成します。これらの N 次元関数は 2 次元および 3 次元をサポートしていますが、三角形分割探索メソッドほど一般的でも効率的でもありません。
この例では、delaunayTriangulation を使用して 2 次元で最近傍探索を実行する方法を説明します。
まず、15 個の点からなるランダムな集合を作成します。
X = [3.5 8.2; 6.8 8.3; 1.3 6.5; 3.5 6.3; 5.8 6.2; 8.3 6.5;... 1 4; 2.7 4.3; 5 4.5; 7 3.5; 8.7 4.2; 1.5 2.1; 4.1 1.1; ... 7 1.5; 8.5 2.75];
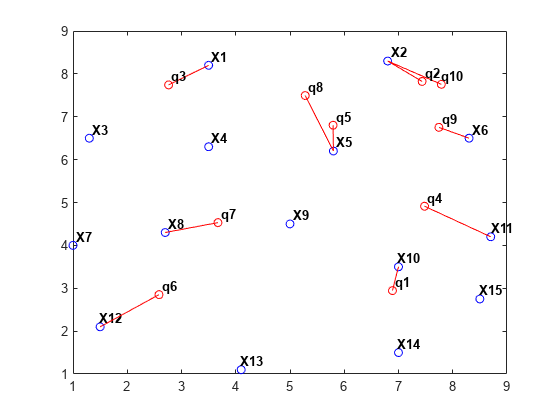
点をプロットし、ID ラベルを示す注釈を追加します。
plot(X(:,1),X(:,2),'ob') hold on vxlabels = arrayfun(@(n) {sprintf("X%d",n)},(1:15)'); Hpl = text(X(:,1) + 0.2,X(:,2) + 0.2,vxlabels, ... FontWeight="bold",HorizontalAlignment="center", ... BackgroundColor="none"); hold off
点から Delaunay 三角形分割を作成します。
dt = delaunayTriangulation(X);
いくつかのクエリ点を作成し、各クエリ点について、対応する X 内の最近傍のインデックスを nearestNeighbor メソッドを使用して求めます。
numq = 10;
rng(0,"twister");
q = 2 + rand(numq,2)*6;
xi = nearestNeighbor(dt,q);クエリ点をプロットに追加し、線分を追加してクエリ点を最近傍に結合します。
xnn = X(xi,:); hold on plot(q(:,1),q(:,2),"or"); plot([xnn(:,1) q(:,1)]',[xnn(:,2) q(:,2)]',"-r"); vxlabels = arrayfun(@(n) {sprintf("q%d",n)},(1:numq)'); Hpl = text(q(:,1) + 0.2,q(:,2) + 0.2,vxlabels, ... FontWeight="bold",HorizontalAlignment="center", ... BackgroundColor="none"); hold off

3 次元での最近傍探索の実行は、delaunayTriangulation に基づいた 2 次元の例を直接拡張したものです。
4 次元以上では、次の例の中で示すように関数 delaunayn と関数 dsearchn を使用します。
4 次元に無作為な点のサンプルを作成し、delaunayn を使って点を三角形分割します。
X = 20*rand(50,4)-10; tri = delaunayn(X);
いくつかのクエリ点を作成し、関数 dsearchn を使って X の各クエリ点に対応する最近傍のインデックスを求めます。
q = rand(5,4); xi = dsearchn(X,tri, q);
nearestNeighbor メソッドおよび関数 dsearchn により、クエリ点と最近傍間のユークリッド距離をオプションの引数として返すことができます。4 次元の例では、距離 dnn は以下のように計算することができます。
[xi,dnn] = dsearchn(X,tri,q);