projectLidarPointsOnImage
LiDAR 点群データをイメージ座標系に投影
構文
説明
imPts = projectLidarPointsOnImage(ptCloudIn,intrinsics,tform)tform と一連のカメラの内部パラメーター intrinsics を使用して、LiDAR 点群データをイメージ座標系に投影します。出力 imPts には、投影された点のイメージ フレームにおける 2 次元座標が格納されます。
imPts = projectLidarPointsOnImage(worldPoints,intrinsics,tform)
[___] = projectLidarPointsOnImage(___, は、前述の構文の任意の引数の組み合わせに加え、1 つ以上の名前と値の引数を使用してオプションを指定します。たとえば、Name,Value)'ImageSize',[250 400] は、点を投影するイメージのサイズを 250 x 400 ピクセルに設定します。
例
同期されたイメージと点群のペア、カメラの内部パラメーター、および LiDAR からカメラへの変換を含む MAT ファイルを読み込みます。
ld = load("sampleColoredPtCloud.mat");イメージと点群データを抽出します。
I = ld.I; ptCloud = ld.ptCloud;
点群データをダウンサンプリングします。
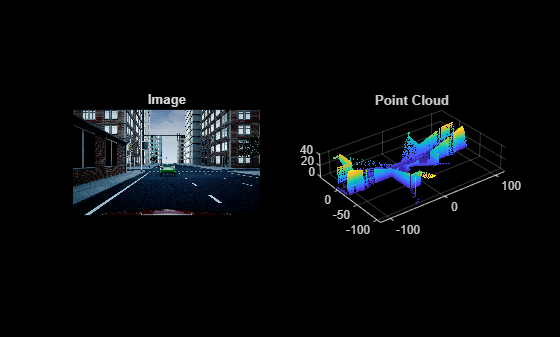
ptCloud = pcdownsample(ptCloud,"gridNearest",0.5);イメージと点群データを可視化します。
figure subplot(1,2,1) imshow(I) title("Image") subplot(1,2,2) pcshow(ptCloud) title("Point Cloud")
カメラの内部パラメーターと、LiDAR センサーからカメラへの変換を取得します。
intrinsics = ld.intrinsics; lidarToCameraTform = ld.lidarToCameraTform;
点群をイメージに投影します。
imPts = projectLidarPointsOnImage(ptCloud,intrinsics,lidarToCameraTform);
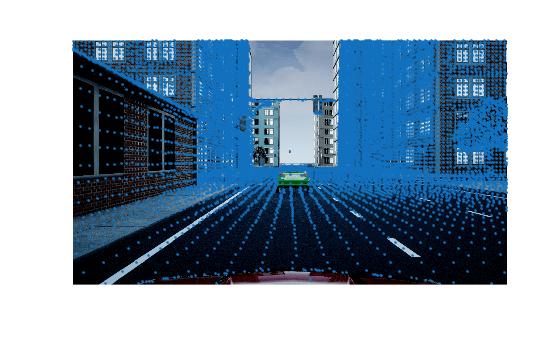
投影された点をイメージに重ね合わせます。
figure imshow(I) hold on plot(imPts(:,1),imPts(:,2),".")