bboxCameraToLidar
Estimate 3-D bounding boxes in point cloud from 2-D bounding boxes in image
Syntax
Description
bboxesLidar = bboxCameraToLidar(bboxesCamera,ptCloudIn,intrinsics,tform)ptCloudIn, from
2-D bounding boxes in an image, bboxesCamera. The function uses camera
intrinsic parameters, intrinsics, and a camera to lidar transformation
matrix, tform, to estimate the 3-D bounding boxes,
bboxesLidar.
[
returns the indices of the point cloud points that are inside the 3-D bounding boxes using
the input arguments from the previous syntax.bboxesLidar,indices] = bboxCameraToLidar(___)
[
indicates for which of the specified 2-D bounding boxes the function detected a
corresponding 3-D bounding box in the point cloud.bboxesLidar,indices,boxesUsed] = bboxCameraToLidar(___)
[___] = bboxCameraToLidar(___,
specifies options using one or more name-value arguments in addition to any of the argument
combinations in previous syntaxes. For example, Name,Value)'ClusterThreshold',0.5
sets the Euclidean distance threshold for differentiating point cloud clusters to 0.5 world
units.
Examples
Load data from a MAT file into the workspace.
ld = load("bboxData.mat");Extract the image, point cloud, and camera intrinsics.
I = ld.I; ptCloud = ld.ptCloud; intrinsics = ld.intrinsics;
Extract the 2-D bounding box to project from the image to the point cloud.
bboxImage = ld.bboxImage;
Display the 2-D bounding box overlaid on the image.
annotatedImage = insertObjectAnnotation(I,"Rectangle",bboxImage,"Vehicle"); figure imshow(annotatedImage)

Estimate the projection of the 2-D bounding box in the point cloud using the transformation from the camera to the lidar sensor.
cameraToLidarTform = ld.cameraToLidarTform;
bboxPtCloud = bboxCameraToLidar(bboxImage,ptCloud,intrinsics,...
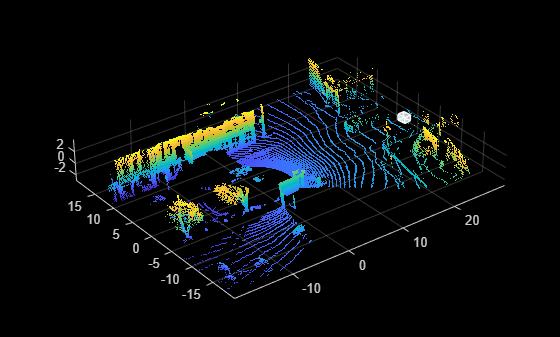
cameraToLidarTform,ClusterThreshold=1);Display the 3-D bounding box overlaid on the point cloud.
figure pcshow(ptCloud) showShape("cuboid",bboxPtCloud,Opacity=0.5,Color="white",LineWidth=1)
Input Arguments
Name-Value Arguments
Output Arguments
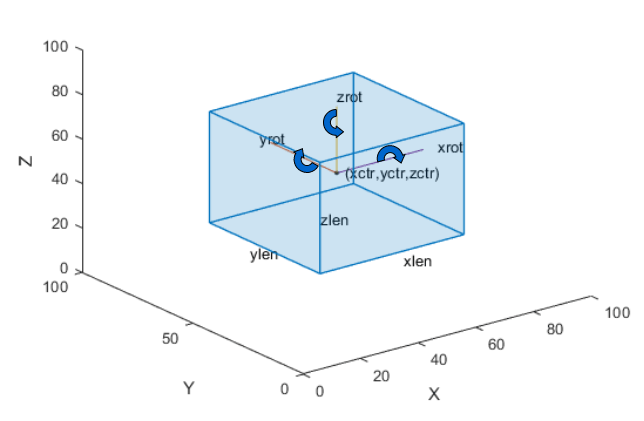
3-D bounding boxes in the lidar frame, returned as an N-by-9 matrix of real values. N is the number of detected 3-D bounding boxes. Each row of the matrix has the form [xctr yctr zctr xlen ylen zlen xrot yrot zrot].
xctr, yctr, and zctr — These values specify the x-, y-, and z-axis coordinates, respectively, of the center of the cuboid bounding box.
xlen, ylen, and zlen — These values specify the length of the cuboid along the x-, y-, and z-axis, respectively, before it is rotated.
xrot, yrot, and zrot — These values specify the rotation angles of the cuboid around the x-, y-, and z-axis, respectively. These angles are clockwise-positive when looking in the forward direction of their corresponding axes.
This figure shows how these values determine the position of a cuboid.
Data Types: single | double
Indices of the points inside the 3-D bounding boxes, returned as a column vector or an N-element cell array.
If the function detects only one 3-D bounding box in the point cloud, it returns a column vector. Each element of the vector is the point cloud index of a point detected in the 3-D bounding box.
If the function detects multiple 3-D bounding boxes, it returns an N-element cell array. N is the number of 3-D bounding boxes detected in the point cloud, and each element of the cell array contains the point cloud indices of the points detected in the corresponding 3-D bounding box.
Data Types: single | double
Bounding box detection flag, returned as an M-element row vector
of logicals. M is the number of input 2-D bounding boxes. If the
function detects a corresponding 3-D bounding box in the point cloud, then it returns a
value of true for that input 2-D bounding box. If the function does
not detect a corresponding 3-D bounding box, then it returns a value of
false.
Data Types: logical