ss2ss
状態空間モデルの状態座標変換
説明
ss2ss は、状態空間モデルの状態ベクトル x に対して相似変換 z = Tx を実行します。詳細については、アルゴリズムを参照してください。
例
状態空間モデルの相似変換を実行します。
ランダムな状態空間モデルと変換行列を生成します。
rng(0) sys = rss(5); t = randn(5);
変換を実行して、両方のモデルの周波数応答をプロットします。
tsys = ss2ss(sys,t); bode(sys,'b',tsys,'r--') legend
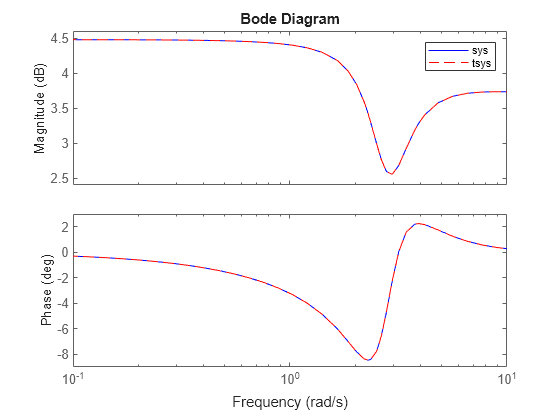
両方のモデルの応答が厳密に一致します。
ss2ss は、状態変換を、一般化モデルの数値部分の状態ベクトルにのみ適用します。
genss モデルを作成します。
sys = rss(2,2,2) * tunableSS('a',2,2,3) + tunableGain('b',2,3)
Generalized continuous-time state-space model with 2 outputs, 3 inputs, 4 states, and the following blocks: a: Tunable 2x3 state-space model, 2 states, 1 occurrences. b: Tunable 2x3 gain, 1 occurrences. Model Properties Type "ss(sys)" to see the current value and "sys.Blocks" to interact with the blocks.
変換行列を指定して、変換を取得します。
T = [1 -2;3 5]; tsys = ss2ss(sys,T)
Generalized continuous-time state-space model with 2 outputs, 3 inputs, 4 states, and the following blocks: a: Tunable 2x3 state-space model, 2 states, 1 occurrences. b: Tunable 2x3 gain, 1 occurrences. Model Properties Type "ss(tsys)" to see the current value and "tsys.Blocks" to interact with the blocks.
両方のモデルを分解します。
[H,B,~,~] = getLFTModel(sys); [H1,B1,~,~] = getLFTModel(tsys);
分解された sys からのモデルで個別に変換を取得します。
H2 = ss2ss(H,T);
この変換されたモデルを、分解された tsys からのモデルと比較します。
isequal(H1,H2)
ans = logical
1
両方のモデルは等価です。
ファイル icEngine.mat には、サンプリング レート 0.04 秒で収集した 1500 の入力/出力サンプルによる 1 つのデータセットが含まれます。入力 u(t) は、By-Pass Idle Air Valve (BPAV) を制御する電圧 (V) で、出力 y(t) は、エンジン速度 (RPM/100) です。
icEngine.mat のデータを使用して、同定可能なパラメーターをもつ状態空間モデルを作成します。
load icEngine.mat z = iddata(y,u,0.04); sys = n4sid(z,4,'InputDelay',2);
ランダムな変換行列を指定します。
T = randn(4);
変換を取得します。
sysT = ss2ss(sys,T);
周波数応答を比較します。
bode(sys,'b',sysT,'r--') legend
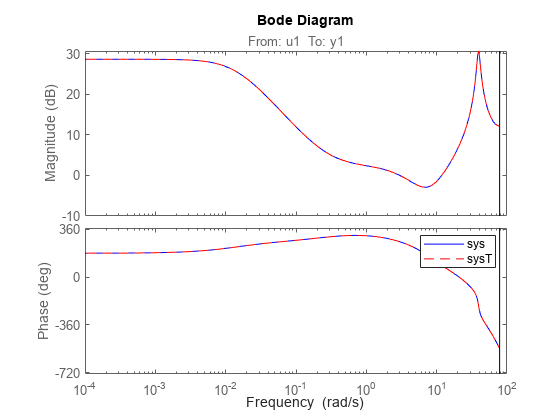
応答は厳密に一致します。
ss2ss を使用して、複素係数をもつモデルの相似変換も実行できます。
この例では、複素係数をもつランダムな状態空間モデルを生成します。
rng(0) sys = ss(randn(5)+1i*randn(5),randn(5,3),randn(2,5)+1i*randn(2,5),0,.1);
複素数データを含む変換行列を指定します。
T = randn(5)+1i*randn(5);
変換を取得します。
sysT = ss2ss(sys,T);
周波数応答の特異値を比較します。
sigma(sys,'b',sysT,'r--') legend

応答は両方の分岐で厳密に一致します。
入力引数
出力引数
アルゴリズム
ss2ss は、状態空間モデルの状態ベクトル x に対して相似変換 を実行します。
各モデル形式について ss2ss で返される変換を次の表にまとめます。
| 入力モデル | 変換後のモデル |
|---|---|
次の形式の陽的な状態空間モデル: | |
次の形式の記述子 (陰的な) 状態空間モデル: | |
次の形式の同定された状態空間 ( | |
バージョン履歴
R2006a より前に導入参考
balreal (Control System Toolbox) | canon (Control System Toolbox) | balance
トピック
- 状態空間モデルを最大精度にスケーリング (Control System Toolbox)