compreal
説明
例
aircraftPitchSSModel.mat には、入力が昇降舵の偏向角 で、出力が航空機ピッチ角 である航空機の状態空間行列が含まれています。
モデルのデータをワークスペースに読み込み、状態空間モデル sys を作成します。
load('aircraftPitchSSModel.mat');
sys = ss(A,B,C,D)sys =
A =
x1 x2 x3
x1 -0.313 56.7 0
x2 -0.0139 -0.426 0
x3 0 56.7 0
B =
u1
x1 0.232
x2 0.0203
x3 0
C =
x1 x2 x3
y1 0 0 1
D =
u1
y1 0
Continuous-time state-space model.
Model Properties
結果の状態空間モデル sys を可制御コンパニオン形式に変換します。
csys = compreal(sys)
csys =
A =
x1 x2 x3
x1 0 0 1.914e-15
x2 1 0 -0.9215
x3 0 1 -0.739
B =
u1
x1 1
x2 0
x3 0
C =
x1 x2 x3
y1 0 1.151 -0.6732
D =
u1
y1 0
Continuous-time state-space model.
Model Properties
csys は sys の可制御コンパニオン形式です。
ファイル icEngine.mat には、サンプリング レート 0.04 秒で収集した 1500 の入力/出力サンプルによる 1 つのデータ セットが含まれます。入力 u(t) は、By-Pass Idle Air Valve (BPAV) を制御する電圧 (V) で、出力 y(t) は、エンジン速度 (RPM/100) です。
icEngine.mat のデータを使用して、同定可能なパラメーターをもつ状態空間モデルを作成します。
load icEngine.mat z = iddata(y,u,0.04); sys = n4sid(z,4,'InputDelay',2);
同定された状態空間モデル sys を可観測コンパニオン形式に変換します。
[osys,T] = compreal(sys,"o");sys の周波数応答の信頼限界を osys と比較します。
bp = bodeplot(sys,osys,'r.');
showConfidence(bp)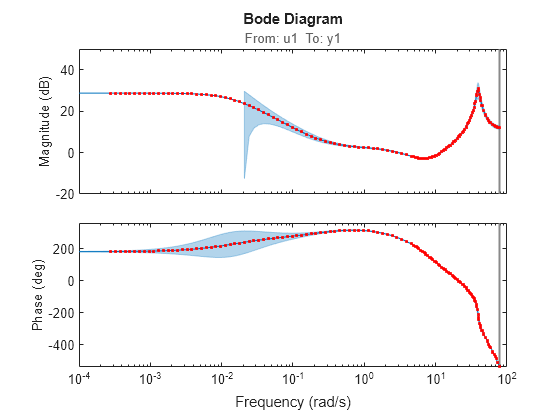
周波数応答の信頼限界は同一です。
また、compreal は可観測コンパニオン形式が 、、 になるように変換行列 T を返します。
入力引数
出力引数
ヒント
コンパニオン実現の計算には、多くの場合、悪条件の変換および精度の損失が伴います。数値的に安定した代替方法としては、modalreal または balreal を使用してください。
バージョン履歴
R2023b で導入