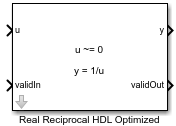
Real Reciprocal HDL Optimized
CORDIC アルゴリズムを使って逆数を計算して最適化された HDL コードを生成
ライブラリ:
Fixed-Point Designer HDL Support /
Math Operations
説明
Real Reciprocal HDL Optimized ブロックは、1/u を計算します。ここで、u は実数スカラーです。
例

ハードウェア効率に優れた Real Divide HDL Optimized の実装
Real Divide HDL Optimized ブロックの使用方法。
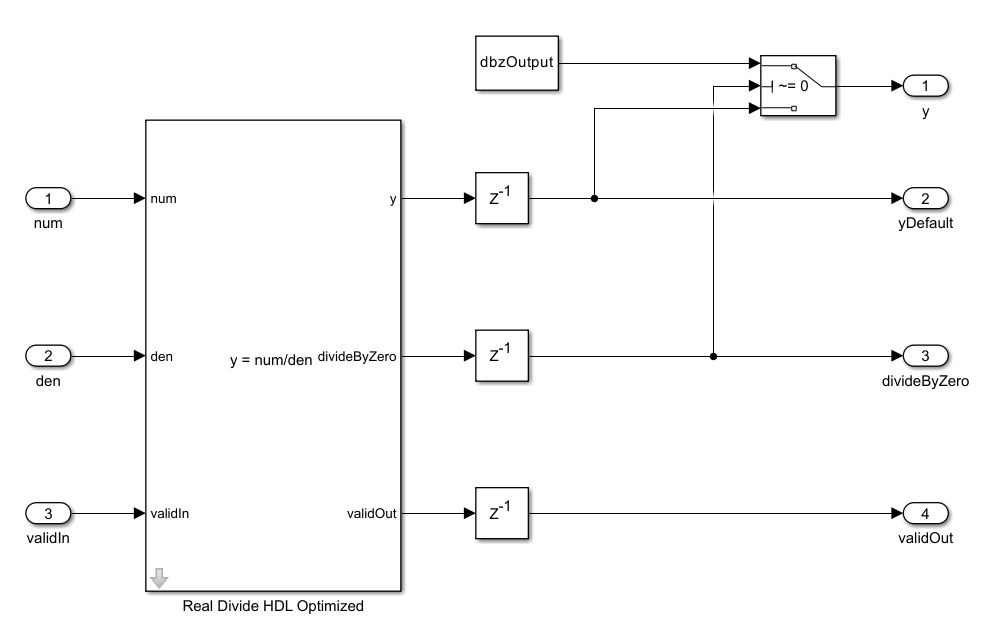
Customize Output Value of Real Divide HDL Optimized Block When Denominator Is Zero
Use the divideByZero port to customize the value of the block output when division by zero occurs.

How to Set CORDIC Input Word Length and Maximum Shift Value to Achieve Desired Precision
Provides a starting point for the input data type and number of iterations or maximum shift value required for the CORDIC algorithm to achieve a desired accuracy.
制限
Real Reciprocal HDL Optimized ブロックではデータ型オーバーライドはサポートされていません。
端子
入力
出力
パラメーター
ヒント
Real Reciprocal HDL Optimized ブロックの動作は
fixed.cordicReciprocal関数と同じです。関数への入力が 2 進小数点でスケーリングされた固定小数点データ型をもつ実数の場合、関数とブロックはビット単位で正確に一致する結果を提供します。
アルゴリズム
Real Reciprocal HDL Optimized ブロックは、完全にパイプライン化されるという性質から、連続するクロック サイクルを含む任意のサイクルで入力データを受け入れることができます。入力データをブロックに送信するには、validIn 信号が true でなければなりません。ブロックが計算を終え、出力を送信する準備ができると、1 クロック サイクルの間、validOut を true に変更します。連続するサイクルの入力のセットの場合、連続するサイクルでも validOut が true に設定されます。
レイテンシは入力から対応する出力までとして定義されます。たとえば、次の図では、In1 から Out1 まで、In2 から Out2 まで、In3 から Out3 までです。

参照
[1] Volder, Jack E. “The CORDIC Trigonometric Computing Technique.” IRE Transactions on Electronic Computers EC-8, no. 3 (Sept. 1959): 330–334.
[2] Andraka, Ray. “A Survey of CORDIC Algorithm for FPGA Based Computers.” In Proceedings of the 1998 ACM/SIGDA Sixth International Symposium on Field Programmable Gate Arrays, 191–200. https://dl.acm.org/doi/10.1145/275107.275139.
[3] Walther, J.S. “A Unified Algorithm for Elementary Functions.” In Proceedings of the May 18-20, 1971 Spring Joint Computer Conference, 379–386. https://dl.acm.org/doi/10.1145/1478786.1478840.
[4] Schelin, Charles W. “Calculator Function Approximation.” The American Mathematical Monthly, no. 5 (May 1983): 317–325. https://doi.org/10.2307/2975781.