Signal From Workspace
MATLAB ワークスペースから信号をインポートする
ライブラリ:
DSP System Toolbox /
Sources
説明
Signal From Workspace ブロックは、MATLAB® ワークスペースから Simulink® モデルへ信号をインポートします。[信号] パラメーターは、インポートする信号を含んだ MATLAB ワークスペース変数の名前か、行列または 3 次元配列を定義する任意の有効な MATLAB 式のいずれかを指定します。
Simulink From Workspace (Simulink) ブロックとは異なり、Signal From Workspace ブロックは連続した出力フレーム間の出力値を一定に保持します (つまり、線形内挿が行われません)。また、初期信号値は常に t=0 で直ちに生成されます。
例
Signal From Workspace ブロックを使用して、2 チャネル信号 A を MATLAB® ワークスペースから Simulink® モデルにインポートします。To Workspace ブロックを使用して、インポートしたデータを MATLAB ワークスペースに書き込みます。このモデルでは、To Workspace ブロックが、わずかに変更されたデータを MATLAB ワークスペースに書き込みます。
Signal From Workspace ブロックのパラメーターは次のように構成されます。
[サンプル時間] を
1に設定: このパラメーターによって、出力のサンプル周期 Ts が決まります。[フレームあたりのサンプル数] を
4に設定: 各出力フレームにバッファリングするサンプルの数 Mo。出力フレーム周期は MoTs です。[最終値の後の出力フォーム] を
Setting to zeroに設定: ブロックは信号の最後のフレームを生成後、シミュレーションの間、ゼロ値の出力を生成します。
ex_signal_from_workspace_frames.slx モデルを開いてシミュレートします。
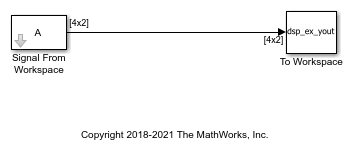
Signal From Workspace ブロックは、10 行 2 列の行列である変数 A から信号をインポートします。モデルをシミュレートすると、データ出力のフレーム サイズは 4 になり、フレーム周期 MoTs は 4 秒になります。このモデルでは、[最終データ値の後の出力フォーム] パラメーターが Setting to zero に設定されているため、3 番目のフレーム (t = 8) 以降のすべての出力はゼロになります。To Workspace ブロックは、この変更された出力を MATLAB ワークスペース内の変数 dsp_ex_yout に書き込みます。
次の図は、入力変数 A の信号と、このデータがどのように出力配列 dsp_ex_yout に書き込まれるかを示しています。
Signal From Workspace ブロックを使用して、MATLAB® ワークスペースから 3 次元配列 A を Simulink® モデルにインポートします。To Workspace ブロックを使用して、インポートしたデータを MATLAB ワークスペースに書き込みます。このモデルでは、To Workspace ブロックによってデータがわずかに変更されます。
Signal From Workspace ブロックのパラメーターは次のように構成されます。
[サンプル時間] を
1に設定: このパラメーターによって、出力のサンプル周期 Ts が決まります。[フレームあたりのサンプル数] を
1に設定: 各出力フレームにバッファリングするサンプルの数 Mo。出力フレーム周期は MoTs です。[最終データ値の後の出力フォーム] を
Setting to zeroに設定: ブロックは信号の最後のフレームを生成後、シミュレーションの間、ゼロ値の出力を生成します。
ex_signal_from_workspace_3d.slx モデルを開いてシミュレートします。
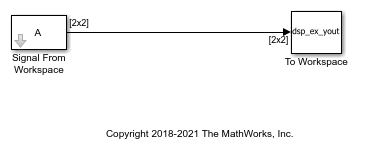
Signal From Workspace ブロックは、2×2×3 の配列である変数 A から信号をインポートします。モデルをシミュレートすると、3 つのページ (2 行 2 列の行列) がそれぞれ周期 Ts で順番に出力されます。このモデルでは、[最終データ値の後の出力フォーム] パラメーターが Setting to zero に設定されているため、3 ページ目はゼロの行列になります。"To Workspace" ブロックは、これらの行列のシーケンスを MATLAB ワークスペースの変数 dsp_ex_yout に書き込みます。
次の図は、入力変数 A の信号と、このデータがどのように出力配列 dsp_ex_yout に書き込まれるかを示しています。
端子
出力
パラメーター
ブロックの特性
データ型 |
|
直達 |
|
多次元信号 |
|
可変サイズの信号 |
|
ゼロクロッシング検出 |
|
拡張機能
バージョン履歴
R2006a より前に導入
参考
ブロック
- Signal To Workspace | From Workspace (Simulink) | To Workspace (Simulink) | Triggered Signal From Workspace