複数の出力をもつネットワークの学習
この例では、手書きの数字のラベルと回転角度の両方を予測する、複数の出力をもつ深層学習ネットワークに学習させる方法を説明します。
学習データの読み込み
数字のデータを読み込みます。データには、数字のイメージ、数字のラベル、垂直方向からの回転角度が含まれています。
load DigitsDataTrainイメージ、ラベル、角度について arrayDatastore オブジェクトを作成してから、関数 combine を使用して、すべての学習データを含む単一のデータストアを作成します。
dsXTrain = arrayDatastore(XTrain,IterationDimension=4); dsT1Train = arrayDatastore(labelsTrain); dsT2Train = arrayDatastore(anglesTrain); dsTrain = combine(dsXTrain,dsT1Train,dsT2Train); classNames = categories(labelsTrain); numClasses = numel(classNames); numObservations = numel(labelsTrain);
学習データからの一部のイメージを表示します。
idx = randperm(numObservations,64); I = imtile(XTrain(:,:,:,idx)); figure imshow(I)
深層学習モデルの定義
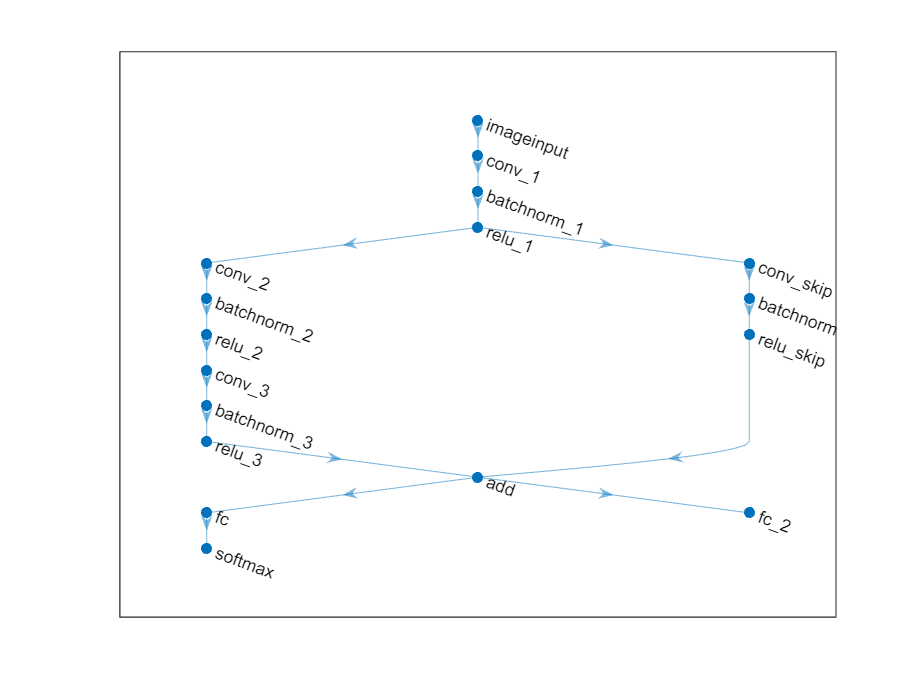
ラベルと回転角度の両方を予測する次のネットワークを定義します。
16 個の 5 x 5 フィルターをもつ convolution-batchnorm-ReLU ブロック
それぞれ 32 個の 3 x 3 フィルターをもつ 2 つの convolution-batchnorm-ReLU ブロック
32 個の 1 x 1 の畳み込みをもつ convolution-batchnorm-ReLU ブロックを含む、前述の 2 つのブロックのスキップ接続
加算を使用するスキップ接続のマージ
分類出力用に、サイズが 10 (クラス数) の全結合演算とソフトマックス演算をもつ分岐
回帰出力用に、サイズが 1 (応答数) の全結合演算をもつ分岐
層のメイン ブロックを定義します。
net = dlnetwork;
layers = [
imageInputLayer([28 28 1],Normalization="none")
convolution2dLayer(5,16,Padding="same")
batchNormalizationLayer
reluLayer(Name="relu_1")
convolution2dLayer(3,32,Padding="same",Stride=2)
batchNormalizationLayer
reluLayer
convolution2dLayer(3,32,Padding="same")
batchNormalizationLayer
reluLayer
additionLayer(2,Name="add")
fullyConnectedLayer(numClasses)
softmaxLayer(Name="softmax")];
net = addLayers(net,layers);スキップ接続を追加します。
layers = [
convolution2dLayer(1,32,Stride=2,Name="conv_skip")
batchNormalizationLayer
reluLayer(Name="relu_skip")];
net = addLayers(net,layers);
net = connectLayers(net,"relu_1","conv_skip");
net = connectLayers(net,"relu_skip","add/in2");回帰用に全結合層を追加します。
layers = fullyConnectedLayer(1,Name="fc_2"); net = addLayers(net,layers); net = connectLayers(net,"add","fc_2");
層グラフをプロットで表示します。
figure plot(net)
学習オプションの指定
学習オプションを指定します。オプションの中から選択するには、経験的解析が必要です。実験を実行してさまざまな学習オプションの構成を調べるには、実験マネージャーアプリを使用できます。
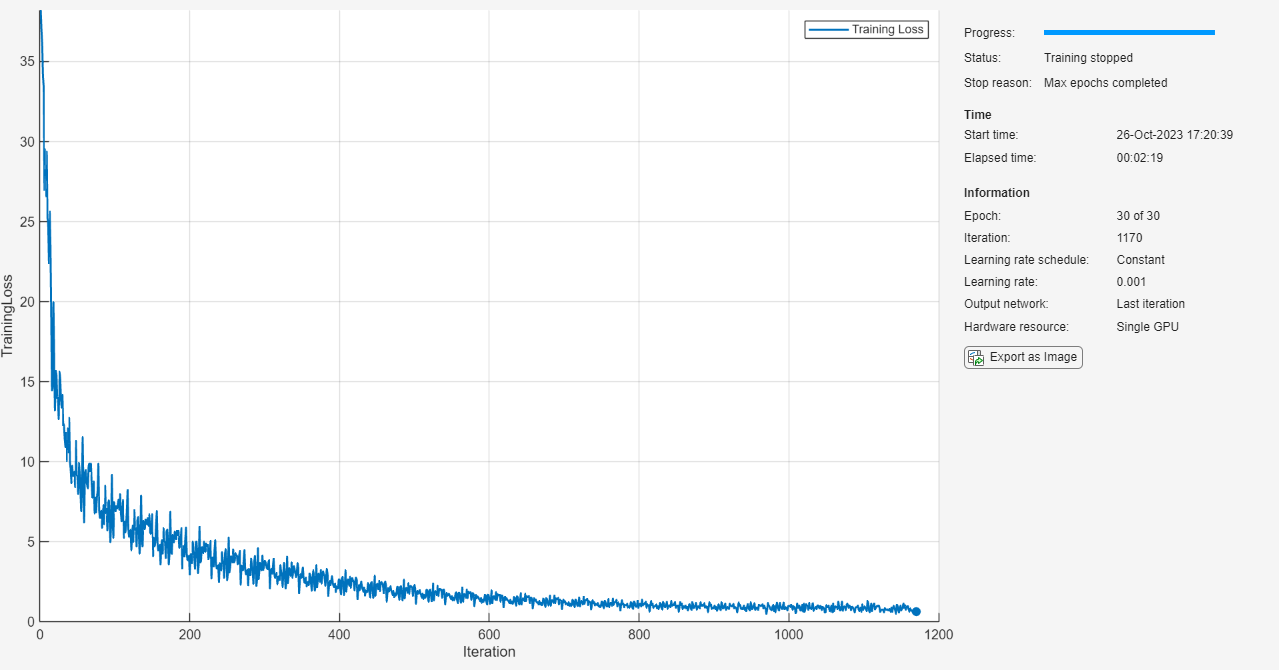
options = trainingOptions("adam", ... Plots="training-progress", ... Verbose=false);
ニューラル ネットワークの学習
関数trainnetを使用してニューラル ネットワークに学習させます。分類には、予測ラベルとターゲット ラベルのクロスエントロピー損失に予測角度とターゲット角度の平均二乗誤差損失の 0.1 倍を加えるカスタム損失関数を使用します。既定では、関数 trainnet は利用可能な GPU がある場合にそれを使用します。GPU を使用するには、Parallel Computing Toolbox™ ライセンスとサポートされている GPU デバイスが必要です。サポートされているデバイスの詳細については、GPU 計算の要件 (Parallel Computing Toolbox)を参照してください。そうでない場合、関数は CPU を使用します。実行環境を指定するには、ExecutionEnvironment 学習オプションを使用します。
カスタム損失関数を関数ハンドルとして定義します。損失を、予測ラベルとターゲット ラベルのクロスエントロピー損失に予測角度とターゲット角度の平均二乗誤差の 0.1 倍を加えた値として定義します。
lossFcn = @(Y1,Y2,T1,T2) crossentropy(Y1,T1) + 0.1*mse(Y2,T2);
ニューラル ネットワークに学習させます。
net = trainnet(dsTrain,net,lossFcn,options);
モデルのテスト
数字のデータを読み込みます。データには、数字のイメージ、数字のラベル、垂直方向からの回転角度が含まれています。
load DigitsDataTestminibatchpredict関数を使用して予測を行い、scores2label関数を使用して分類スコアをラベルに変換します。既定では、関数 minibatchpredict は利用可能な GPU がある場合にそれを使用します。GPU を使用するには、Parallel Computing Toolbox™ ライセンスとサポートされている GPU デバイスが必要です。サポートされているデバイスの詳細については、GPU 計算の要件 (Parallel Computing Toolbox)を参照してください。そうでない場合、関数は CPU を使用します。実行環境を手動で選択するには、minibatchpredict 関数の ExecutionEnvironment 引数を使用します。
[scores,Y2] = minibatchpredict(net,XTest); Y1 = scores2label(scores,classNames);
ラベルの分類精度を計算します。
accuracy = mean(Y1 == labelsTest)
accuracy = 0.9732
予測角度とターゲット角度の間の平方根平均二乗誤差を計算します。
err = rmse(Y2,anglesTest)
err = single
6.9265
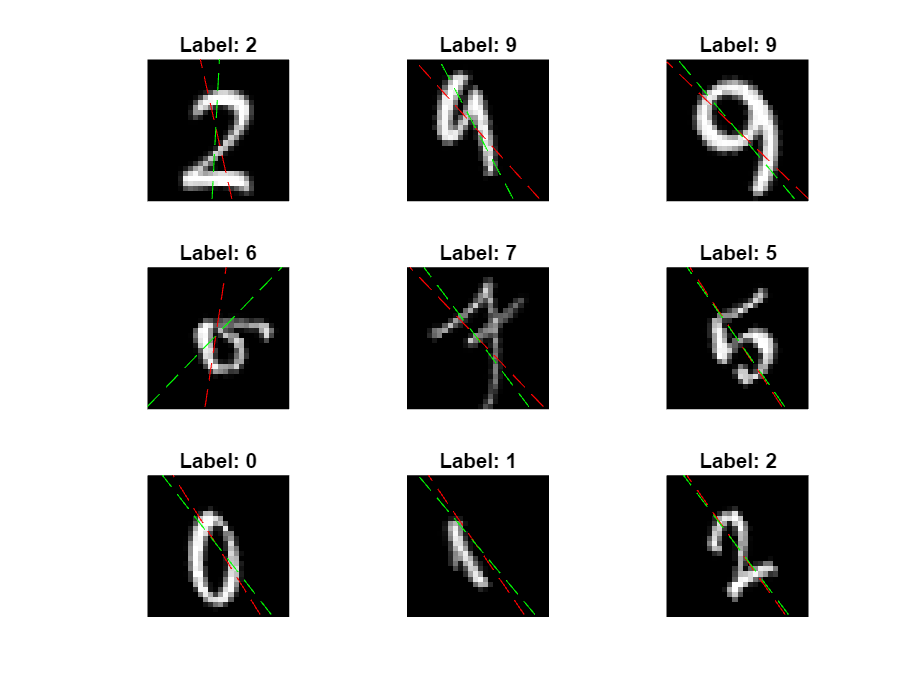
一部のイメージと、その予測を表示します。予測角度を赤、正解ラベルを緑で表示します。
idx = randperm(size(XTest,4),9); figure for i = 1:9 subplot(3,3,i) I = XTest(:,:,:,idx(i)); imshow(I) hold on sz = size(I,1); offset = sz/2; theta = Y2(idx(i)); plot(offset*[1-tand(theta) 1+tand(theta)],[sz 0],"r--") thetaTest = anglesTest(idx(i)); plot(offset*[1-tand(thetaTest) 1+tand(thetaTest)],[sz 0],"g--") hold off label = Y1(idx(i)); title("Label: " + string(label)) end
参考
trainnet | trainingOptions | dlnetwork | batchNormalizationLayer | convolution2dLayer | reluLayer | fullyConnectedLayer | softmaxLayer | minibatchqueue