getCompSensitivity
制御システムの一般化モデルからの相補感度関数
説明
例
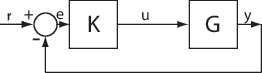
相補感度を次の図の制御システムのプラント出力 X で計算します。

数値 LTI プラント モデル G、調整可能なコントローラー C、および AnalysisPoint ブロック X を指定し、接続することで、システムのモデルを作成します。AnalysisPoint ブロックを使用して、相補感度 (この例ではプラント出力) を評価する位置をマークします。
G = tf([1],[1 5]); C = tunablePID('C','p'); C.Kp.Value = 3; X = AnalysisPoint('X'); CL = feedback(G*C,X);
CL は、r から y への制御システムの閉ループ応答を表す genss モデルです。モデルの制御設計ブロックを調べます。
CL.Blocks
ans = struct with fields:
C: [1×1 tunablePID]
X: [1×1 AnalysisPoint]
このモデルのブロックには、解析ポイントの位置を特定する AnalysisPoint ブロック X が含まれます。
相補感度 T を X で計算します。
T = getCompSensitivity(CL,'X')Generalized continuous-time state-space model with 1 outputs, 1 inputs, 1 states, and the following blocks: C: Tunable PID controller, 1 occurrences. X: Analysis point, 1 channels, 1 occurrences. Model Properties Type "ss(T)" to see the current value and "T.Blocks" to interact with the blocks.
getCompSensitivity は CL の制御設計ブロックを保持し、genss モデルを返します。数値モデルを取得するために、調整可能なブロックの現在の値を使用して、T を伝達関数形式に変換できます。
Tnum = tf(T)
Tnum = From input "X" to output "X": -3 ----- s + 8 Continuous-time transfer function. Model Properties
次の図のマルチループ システムで、外側のループが開いた状態で G2 の出力において内側のループの感度を計算します。

数値プラント モデル、調整可能なコントローラー、および AnalysisPoint ブロックの指定と接続を行って、システムのモデルを作成します。G1 と G2 はプラント モデル、C1 と C2 は調整可能なコントローラー、X1 と X2 はループ開始の可能な位置をマークする AnalysisPoint ブロックです。
G1 = tf(10,[1 10]); G2 = tf([1 2],[1 0.2 10]); C1 = tunablePID('C','pi'); C2 = tunableGain('G',1); X1 = AnalysisPoint('X1'); X2 = AnalysisPoint('X2'); CL = feedback(G1*feedback(G2*C2,X2)*C1,X1);
外側のループが X1 で開いた状態で、X2 における相補感度 を計算します。X1 を 3 番目の入力引数として指定すると、getCompSensitivity によってその位置でループが開かれます。
T = getCompSensitivity(CL,'X2','X1'); tf(T)
ans =
From input "X2" to output "X2":
-s - 2
----------------
s^2 + 1.2 s + 12
Continuous-time transfer function.
Model Properties
入力引数
出力引数
詳細
"相補感度関数" T は、ある点では、指定された位置で測定されたフィードバック ループの周囲の閉ループ伝達関数です。これは、同じ点で、開ループ伝達関数 L および感度関数 S と次のように関係します。
getLoopTransfer と getSensitivity を使用して、L と S を計算します。
以下のモデルを考えます。
y での相補感度 T は、dy から y への伝達関数として定義されます。

感度関数とは対照的に、測定値 y の "後に" 外乱 dy が追加されます。
ここで、I は GK と同じサイズの単位行列です。y での相補感度達関数は、r から y への閉ループ伝達関数に -1 を掛け合わせたものと同じです。
複数の位置、たとえば u と y での相補感度は、外乱から測定値への MIMO 伝達関数として定義されます。

バージョン履歴
R2014a で導入
参考
getPoints | AnalysisPoint | genss | getLoopTransfer | systune | getIOTransfer (Simulink Control Design) | getSensitivity | getValue | getCompSensitivity (Simulink Control Design)