このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
推進
エンジンコンポーネント、システム、ローター、コントローラーをシミュレートする
慣性テンソルを推定して作成します。ある点に加えられた力による重心のモーメントを計算します。エンジンとコントローラーの一次表現を実装するには、ターボファン エンジンシステムを使用します。特定のスロットル位置、マッハ数、高度での推力と燃料流量を計算します。1 つまたは複数の回転プロペラまたはローターによって生成される空力とモーメントを 3 次元すべてで計算します。
ブロック
| Multirotor | マルチプロペラダイナミクス (R2023a 以降) |
| Rotor | ローターダイナミクス (R2023a 以降) |
| Turbofan Engine System | コントローラによるターボファンエンジンの一次表現の実装 |
トピック
- Parrot Minidrones をベースにしたクアッドコプターのモデル化
Parrot® ミニドローンをベースにして、Simulink® でクアッドコプターをモデル化します。
- ステップ 1: クアッドコプターの物理的特性
- ステップ 2: クアッドコプターの制御とセンサー
- ステップ 3: クアッドコプターの機体
- ステップ 4: クワッドコプタープロジェクト環境
- ステップ 5: クワッドコプターの可視化
注目の例

Mars Helicopter Simulink-Based System Level Design
Model a helicopter with coaxial rotors suitable to fly on Mars.
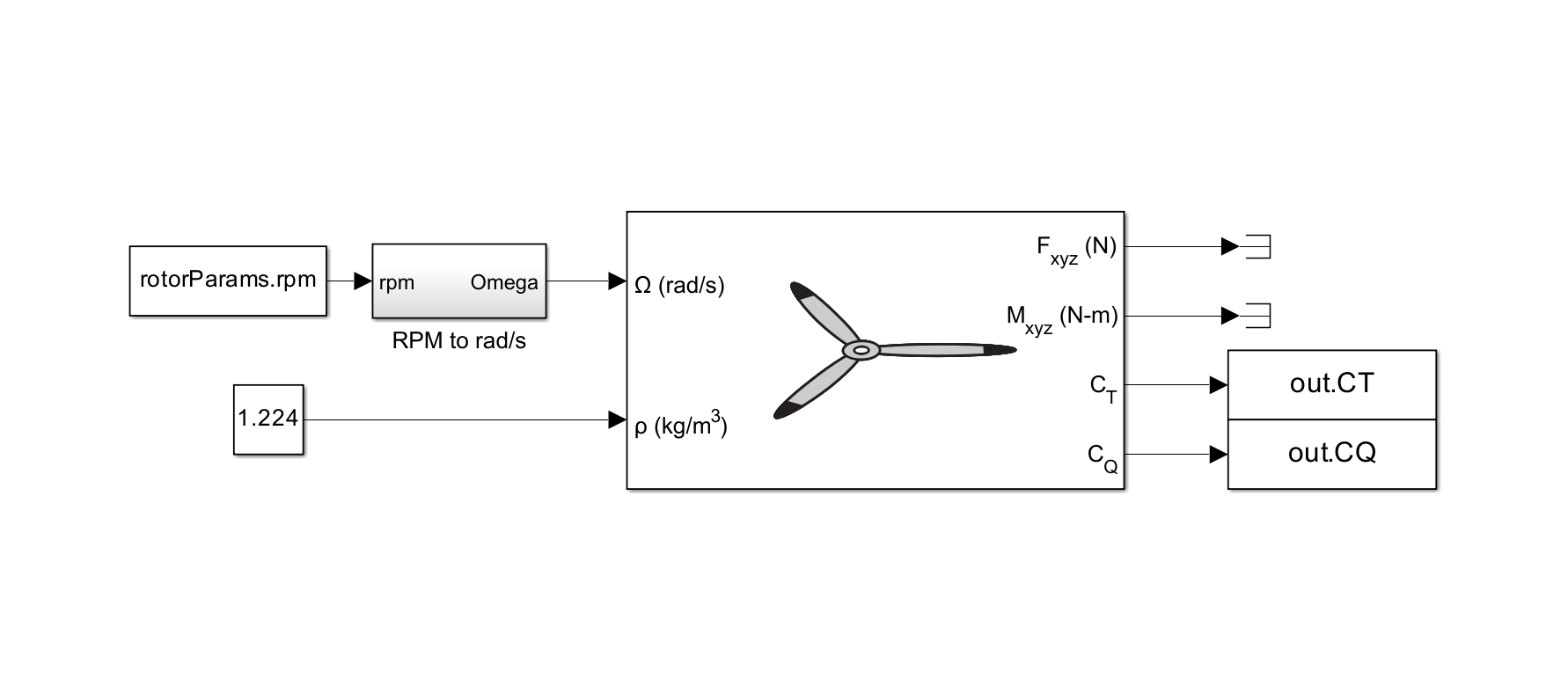
Compute Thrust and Torque Coefficients Using Rotor Block
Compute thrust and torque coefficient of an isolated rotor.

Custom Vertical Takeoff and Landing Example
Use custom visualizations to make four flights to destinations in Boston.

Helicopter Modeling and Simulation
Demonstrates how to model, simulate, control, and visualize a UH-1H helicopter system in Simulink® using the Rotor and 6DOF (Euler Angles) blocks from Aerospace Blockset™.