このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
クアッドコプターの物理的特性
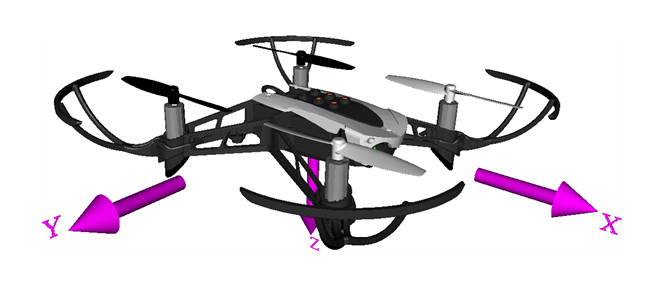
この図は、クアッドコプターの物理的特性を示しています。
座標軸
質量と慣性
回転子
座標軸
クアッドコプターの機体軸は重心に位置します。
X 軸 — X 軸は、ドローンの前方から後方にかけて伸びるドローンの縦軸を表します。X 軸に沿った動きには、ドローンを前方または後方に傾けることが含まれます。
Y 軸 — Y 軸は、ドローンの片側から反対側まで伸びるドローンの横軸を表します。Y 軸に沿った移動では、ドローンを左または右に回転させます。
Z 軸 — Z 軸は、右手の法則に従ってドローンの上部から下部まで伸びるドローンの垂直軸を表します。Z 軸に沿った動きには、上昇または下降、およびドローンをヨーイングして方向を変えることが含まれます。
これらの軸は、3 次元空間におけるドローンの動きと向きを理解し、制御するために重要です。これらは、ドローンの制御、ナビゲーション、安定化に不可欠です。
質量と慣性
ボディ全体が均一な密度の剛体として機能すると仮定します。ファイル vehicleVars には、慣性と質量の値が含まれています。
回転子
Parrot® クワッドコプター ミニドローンの機体は通常、プロペラとも呼ばれる 4 つのローターで構成されています。これらのローターは、ドローンが飛行するために必要な揚力を生成する役割を果たします。Parrot ミニドローンを含むほとんどのクアッドコプターでは、ローターは十字形パターンで構成されており、2 つのローターが時計回りに回転し、他の 2 つのローターが反時計回りに回転します。
この構成により、反対方向の回転によって回転トルクが打ち消され、飛行中にドローンが水平を保つことができるため、安定性と制御性が向上します。さらに、各ローターの速度を個別に制御して、ドローンの高度、ピッチ、ロール、ヨーを変更することもできます。
ローターシステムはドローンの設計において重要なコンポーネントです。ローター システムは、操縦性、安定性、および全体的な飛行性能の鍵となります。
ローター 1 は Z 軸に対して正方向に回転します。このローターは、xy 平面に平行で、x 軸から -45 度の位置にあります。
ローター 2 は、機体の z 軸に対して負の方向に回転します。このローターは、xy 平面に平行で、x 軸から 45 度の位置にあります。
ローター 3 の回転方向はローター 1 と同じです。このローターは、xy 平面に平行で、x 軸から 135 度の位置にあります。
ローター 4 の回転方向はローター 2 と同じです。このローターは、xy 平面に平行で、x 軸から -135 度の位置にあります。
この例では、Aerospace Blockset™ 内の Multirotor ブロックを使用します。このブロックは Prouty によって定義されたアプローチに基づいており、Pounds、Mahony、および Corke [1] によって大型揚力クアッドコプターに適応されました。
コマンドサブシステム
次のいずれかのオプションを使用して、ピッチ(X)、ロール(Y)、ヨー(Z) の入力を北東下 (NED) 座標としてクアッドコプターに提供します。
Signal Editor ブロック
ジョイスティック
以前保存したデータ
スプレッドシート
適切な選択を行うには、ワークスペースの VSS_COMMAND 変数を使用します。このサブシステムは、制御システムへの参照コマンド信号を生成します。
参照
[1] Pounds, P., R. Mahony, and P. Corke. "Modelling and Control of a Large Quadrotor Robot." Control Engineering Practice 18, no. 7 (2010): 691–99. https://doi.org/10.1016/j.conengprac.2010.02.008.